





从以下几个方面来学习kubelet:
1、节点管理
节点管理主要是节点自注册和节点状态更新:
Kubelet可以通过设置启动参数 --register-node来确定是否向API Server注册自己;
如果Kubelet没有选择自注册模式,则需要用户自己配置Node资源信息,同时需要告知Kubelet集群上的API Server的位置;
Kubelet在启动时通过 API Server 注册节点信息,并定时向 API Server 发送节点新消息,API Server在接收到新消息后,将信息写入Etcd中。
2、Pod管理
Kubelet以PodSpec的方式工作。PodSpec 是描述一个 Pod 的YAML或JSON对象。kubelet采用一组通过各种机制提供的PodSpecs(主要通过apiserver),并确保这些PodSpecs中描述的Pod正常健康运行。
向Kubelet提供节点上需要运行的Pod清单的方法:
文件:启动参数--config指定的配置目录下的文件 (默认/ etc/kubernetes/manifests/)。该文件每 20 秒重新检查一次(可配置)。
HTTP endpoint (URL):启动参数--manifest-url设置。每20秒检查一次这个端点(可配置)。
API Server:通过API Server监听Etcd目录,同步Pod清单。
HTTP server:kubelet 侦听 HTTP请求,并响应简单的API以提交新的Pod清单。
本章主要学习通过API Server监听Etcd目录,同步Pod列表的方式。
Kubelet 通过API Server Client(Kubelet启动时创建)使用Watch加List的方式监听"/registry/nodes/$当前节点名"和“/registry/pods”目录,将获取的信息同步到本地缓存中。
Kubelet监听Etcd,所有针对Pod的操作都将会被Kubelet监听到。如果发现有新的绑定到本节点的Pod,则按照Pod清单的要求创建该Pod。
如果发现本地的Pod被修改,则Kubelet会做出相应的修改,比如删除Pod中某个容器时,则通过Docker Client删除该容器。如果发现删除本节点的Pod,则删除相应的Pod,并通过DockerClient删除Pod中的容器。
Pod 启动流程
如图所示:
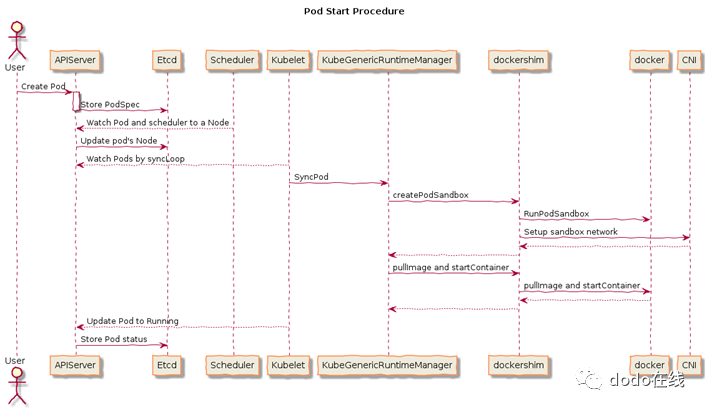 流程如下:
流程如下:
1、用户通过Kubectl或其他API客户端提交Pod spec给API Server;
2、API Server尝试着将Pod对象的相关信息存入Etcd中,待写入操作执行完成,API Server即会返回确认信息至客户端;
3、API Server开始反映Etcd中的状态变化;
4、所有的Kubernetes组件均使用Watch机制来跟踪检查API Server上的相关变动;
5、Kube-scheduler通过其Watch觉察到API Server创建了新的Pod对象但尚未绑定至任何工作节点
6、Kube-scheduler为Pod对象挑选一个工作节点并将结果信息更新至API Server;
7、调度结果信息由API Server更新至Etcd,而且API Server也开始反映此Pod对象的调度结果;
8、Pod被调度到目标工作节点上的kubelet尝试在当前节点上调用Docker启动容器,并将容器的结果状态回送至API Server;
9、API Server将Pod状态信息存入Etcd中;
10、在Etcd确认写入操作成功完成后,API Server将确认信息发送至相关的Kubelet,时间将通过它被接受。
3、容器健康检查
Pod通过两类探针检查容器的健康状态:
(1) LivenessProbe探针(存活探针):用于判断容器是否健康,告诉Kubelet一个容器什么时候处于不健康的状态。如果LivenessProbe探针探测到容器不健康,则Kubelet 将删除该容器,并根据容器的重启策略做相应的处理。
(2)ReadinessProbe探针(就绪探针):用于判断容器是否启动完成且准备接收请求。如果ReadinessProbe探针探测到失败,则Pod的状态将被修改。
Kubelet定期调用容器中的LivenessProbe探针来诊断容器的健康状况。LivenessProbe包含如下三种实现方式:
ExecAction:在容器内部执行一个命令,如果该命令的退出状态码为 0,则表明容器健康;
TCPSocketAction:通过容器的IP地址和端口号执行TCP检查,如果端口能被访问,则表明容器健康;
HTTPGetAction:通过容器的IP地址和端口号及路径调用HTTP GET方法,如果响应的状态码大于等于200且小于400,则认为容器状态健康。
LivenessProbe和ReadinessProbe探针包含在Pod定义的某个主容器中。
4、Kubelet驱逐
Kubelet会监控资源的使用情况,并使用驱逐机制防止计算和存储资源耗尽。在驱逐时,Kubelet将Pod的所有容器停止,并将PodPhase设置为Failed。
5、cAdvisor资源监控
cAdvisor是一个开源的分析容器资源使用率和性能特性的代理工具,集成到Kubele中,当Kubelet启动时会同时启动cAdvisor,且一个cAdvisor只监控一个Node节点的信息。cAdvisor自动查找所有在其所在节点上的容器,自动采集CPU、内存、文件系统和网络使用的统计信息。cAdvisor通过它所在节点机的Root容器,采集并分析该节点机的全面使用情况。
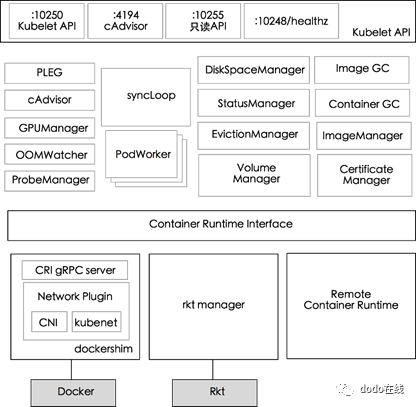
6、ContainerRuntime
容器运行时(Container Runtime)是Kubernetes最重要的组件之一,负责真正管理镜像和容器的生命周期。Kubelet通过容器运行时接口(Container Runtime Interface,CRI) 与容器运行时交互,以管理镜像和容器。
基于CRI容器引擎包括:
1)Docker
2) RKT
3)Virtlet

