




就读大一的OpenAtom openEuler(简称: openEuler) ROS-SIG实习生林鸿宇经过2个月的调研与适配,成功为 openEuler 24.03 引入 ROS 2 Jazzy Jalisco 版本支持(以下简称 ROS2 Jazzy),为推动ROS2生态与操作系统深度融合贡献了新生力量。
ROS2 Jazzy延续了 ROS2 的分布式架构设计理念,升级至 RTI Connext 6.1.1 以改善大规模节点通信时的延迟抖动,并首次引入 rmw_zenoh 中间件预览版,为云端-边缘端的广域网协同提供了新选择。为 openEuler 社区和机器人开发者提供更多可行性与拓展空间,林鸿宇基于 openEuler 已支持的 ROS2 Humble 版本开始着手移植ROS2 Jazzy。
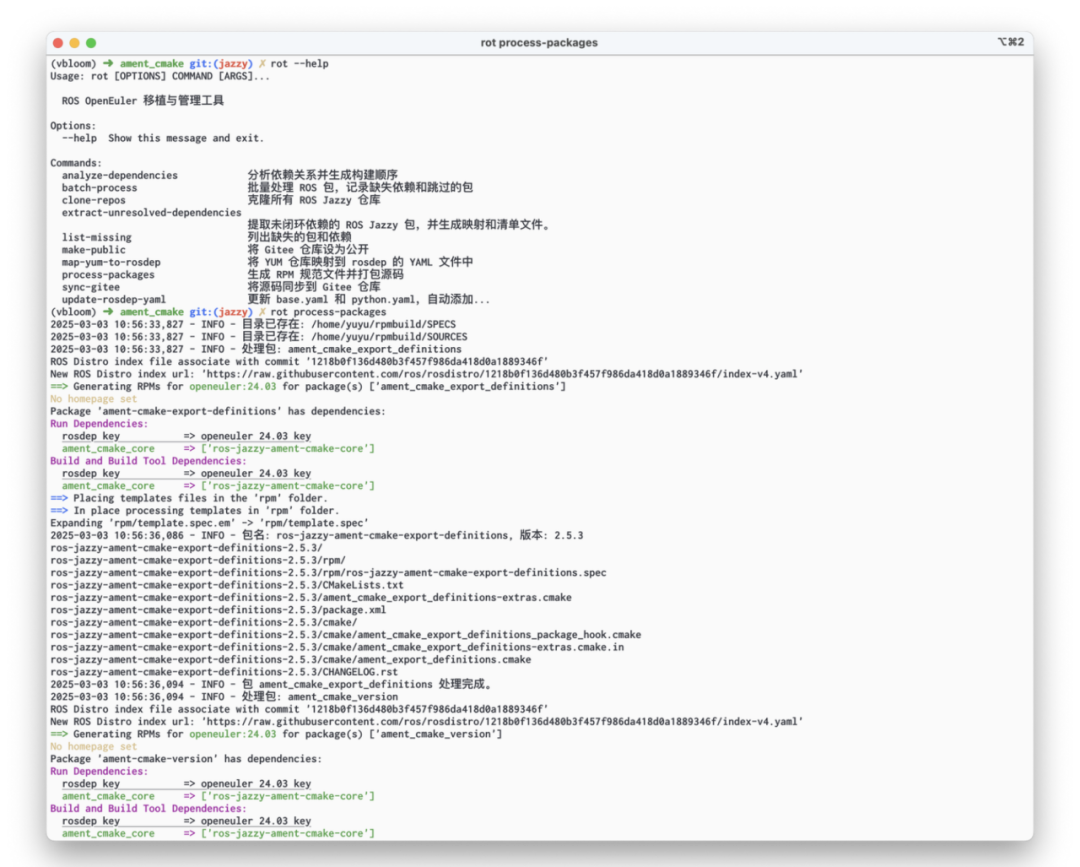
为了更好的适配openEuler工作流,林鸿宇自行开发了名为 ROT(ROS openEuler Tool) 的 Python 工具来自动化处理移植流程。ROT 针对openEuler进行了定制适配,可视作对 bloom、rosdep 等官方工具链的二次封装,包含多个 Python 脚本,可通过命令行调用,目前已支持自动生成 spec 及源码包、成果自动上传至 Gitee、构建错误分析等功能。ROT 仍处于早期探索阶段,仅在内部使用,正在开发可对外的新版工具 ROS-Crossport"。
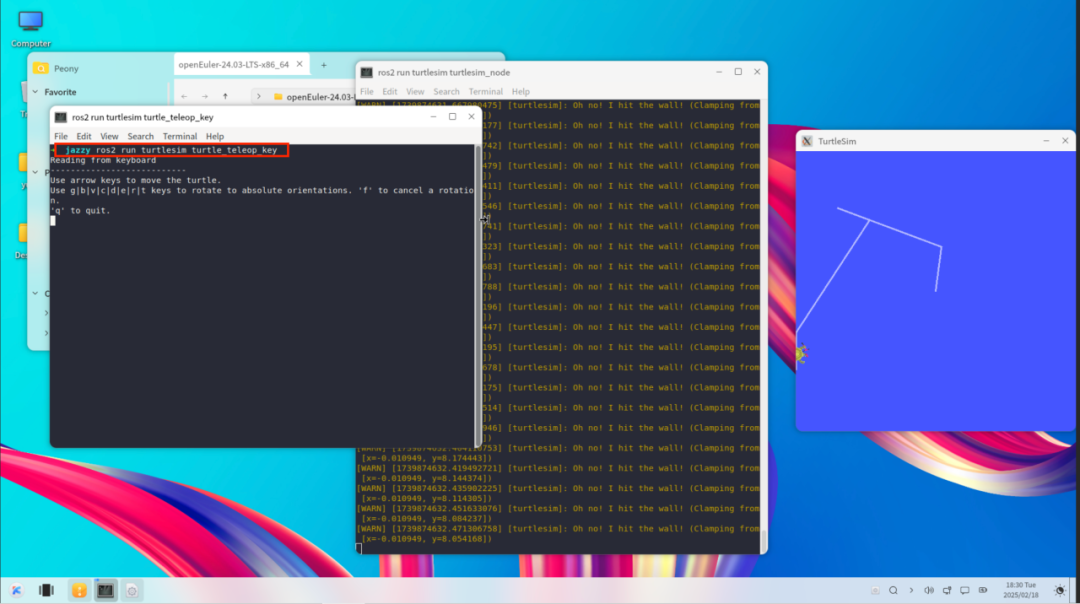
目前,林鸿宇已成功在openEuler 24.03系统上实现ROS2 Jazzy版本的核心功能部署,除经典机器人仿真工具Turtlesim以外,还适配了rqt可视化工具链(含实时数据绘图工具rqt_plot、节点拓扑分析工具rqt_graph等)及全套ROS2命令行工具(包括ros2 topic通信调试、ros2 node节点管理、ros2 launch任务编排、ros2 bag数据回放等关键功能)。openEuler ROS2 Jazzy版本已具备较完整的开发调试功能,开发者可直接基于openEuler系统开展机器人算法开发、通信测试、数据记录等全链路工作。
与传统开发者不同,林鸿宇并不属于“根正苗红”的科班,而是一名工商企业管理专业的大一新生,喜欢吉他以及捣鼓开发板。一个偶然的机会,林鸿宇在高考完的那个暑假经同学介绍了解到了RuyiSDK,随之开始接触到甲辰计划,秉着朴素直观的动机——“机器人方向做出来的东西能够在眼前蹦蹦跳跳的感觉很有意思” 加入到了ROS相关方向,成为了乘风小队的一员。
最初林鸿宇主要负责文职相关内容,如设计 RuyiSDK RevyOS logo,调研开发板等。但他并不满足于此,想要在软硬件赛道挑战自己。随着ROS2 Jazzy的逐步适配,他也完成了从文职工作到openEuler ROS生态贡献者的身份转变,并在此过程中收获了详细的打包流程、技术经验沉淀、以及自研ROT工具。林鸿宇强调:“做一件事情过程和结果一样重要,我想把整个移植过程中有意义的地方分享给大家”。基于此,后续将通过报告/文章形式分享其工具调研、流程解析、实践经验等内容以供开发者参考交流。
文档入口:
https://openeuler-ros-docs.readthedocs.io/en/latest/other-tutorials/openEuler-turtlesim-jazzy-example.html#
交流邮箱:microseyuyu@gmail.com
甲辰计划为林鸿宇提供了一个成长探索的平台,作为工商企业管理专业的大一新生,从0开始逐步前进,专业和年龄都不足以阻挡其开发的脚步。未来,林鸿宇将持续打通ROS2 Jazzy官方教程所覆盖的全功能技术体系,包括核心通信架构、标准工具链及开发套件,确保与ROS官方功能实现良好的兼容对接,并基于ROT升级发布新一代自研机器人开发工具ROS-Crossport,欢迎持续关注。
关于乘风小队:ROS-RV乘风小队聚焦于开源机器人操作系统ROS的研究与推广,致力于推动ROS开源软件包在openEuler、OpenAtom openKylin等操作系统以及RISC-V架构上的适配优化,扩展ROS在操作系统和芯片上的应用。团队核心成员来自中科院软件所和开源爱好者,在ROS、操作系统、RISC-V、开源社区建设等领域有着丰富的经验。
关于作者:
聂雨婷,中国科学院软件研究所PLCT实验室测试及内容运营,以测试保障体验,用内容赋能产品。
