




DSE精选文章
An Efficient Framework for Secure Dynamic Skyline Query Processing in the Cloud
文章介绍
问题定义
1. 动态Skyline查询
动态Skyline查询(Dynamic Skyline Query,DSQ)是Skyline查询的变体,不仅仅从给定的数据集中计算Skyline点,而且根据查询点q返回一系列不被其他点支配的点,换言之这些点比其它点与q更为相似。
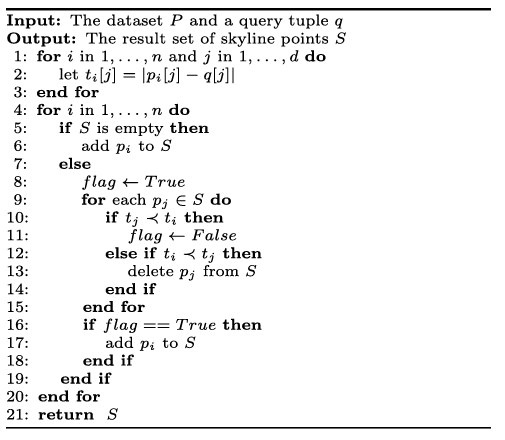
块嵌套循环(Block Nested Loop,BNL)算法(算法1)是一种常见的DSQ算法,基本步骤包括计算数据点与查询q的差值并进行比较,以及逐个检查哪些点可以被或不能被包含在结果集中。
算法1. 用于DSQ的BNL算法
2. 顺序动态加密(ORE)
顺序揭示加密方案(Order-Revealing Encryption schemes,ORE)包括Setup(生成密钥)、Encrypt(加密消息)和Compare(比较密文)三个部分。ORE的特点是允许在保持密文的情况下安全地比较加密的数据,本文在数据集可变的情况下,基于BNL算法和ORE加密实现了安全的DSQ查询。
方法框架
1. DSQ操作的简化
根据算法1,处理给定查询点q的DSQ需要进行减法和比较两个操作,没有现有的加密方案可以同时支持这两种操作。SCALE框架基于图1揭示的一个简单事实:
(1)当q[j] < pα[j] < pβ[j]时,tα[j] - tβ[j] = (pβ[j] - q[j]) - (pα[j] - q[j]) = pβ[j] - pα[j];
(2)当pα[j] < q[j] < pβ[j]时, tα[j] - tβ[j] = (pβ[j] - q[j]) - (q[j] - pα[j]) = pβ[j] + pα[j] - 2q[j];
其中q[j]、pα[j]和pβ[j]分别代表查询点q、数据点pα和pβ第j个维度的值,tα[j]、tβ[j]为数据点与查询点在第j个维度的差值。
也就是说,DSQ的减法和比较操作,可以分解为pα[j]和pβ[j], pβ[j]+pα[j]和2q[j]的比较操作,这样便可以使用支持密文比较的加密方案ORE来实现DSQ。
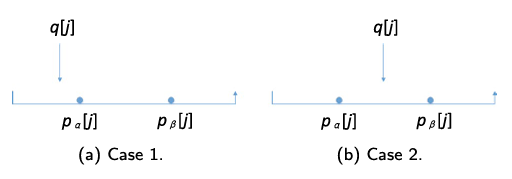
图1. DSQ中q和(pα, pβ)之间的大小关系
2. 数据库加密
数据库加密阶段,论文讨论了使用ORE实现DSQ时防止泄密和加密管理的两个问题。
2.1 顺序泄密
根据1中的分析,我们将比较操作涉及到的元素分为两种,原数据(如pα[j],pβ[j])与数据和(pβ[j]+pα[j]),对应的两种密文分别记为E(P) 和E(Φ)。ORE对原数据采用相同的密钥加密,此时如果对数据和仍然使用相同的密钥加密,就可能会出现泄密的问题。论文给出的方案是将数据和划分为若干个顺序明显类(Order-Obvious Class,OOC):在OOC内使用相同的密钥加密,在OOC间使用不同的密钥加密。
对于包含n个元素的配对求和,可以划分为若干个不相交的子集,使得每个子集中的所有求和都是顺序明显的,这样的子集称为OOC。图2给出了一个划分的示例,已知ORE已经暴露了5个数据的大小关系(b<c<a<e<d),通过图示的画线方式,可以将b、c、a、e、d的数据和分为两组,组内的元素大小顺序是很容易推断出来的,而且和已暴露的关系一致,不会引入额外的信息,而组间采用了不同的密钥加密,因此也不会引入额外的信息,这样就实现了在ORE之外不泄露额外信息的情况下最小化所需密钥数。论文还给出了任意维度上OOC个数(即对应密钥数)的理论公式。
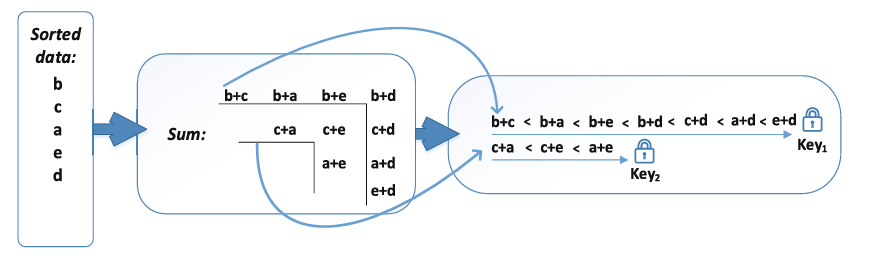
图2. 将数据和划分为多个顺序明显类
2.2 加密管理
为了进一步提升性能,论文还对加密的数据进行了密钥生成、数据和索引、索引检索三方面的优化,密文的存储架构如图3所示。
密钥生成方面,首先存储一个主密钥mk,然后为图2中的每一组OOC分配一个随机的Idi,组密钥通过mk ⊕ Idi 生成。
数据和索引方面,建立了从E(P) 到E(Φ)的映射。假设E(P)中pα[j]、pβ[j]对应密文Enc(pα[j])、Enc(pβ[j])的索引分别为α和β,那么E(Φ)中pα[j]+ pβ[j]对应密文Enc(pα[j]+ pβ[j])的索引可以通过h(α, β)来获取。
索引检索方面,采用基于AVL树的结构来构建索引结构,每棵AVL树的根节点是每个OOC的中位数,AVL树中的所有节点都是同一OOC中和的对的相应密文。
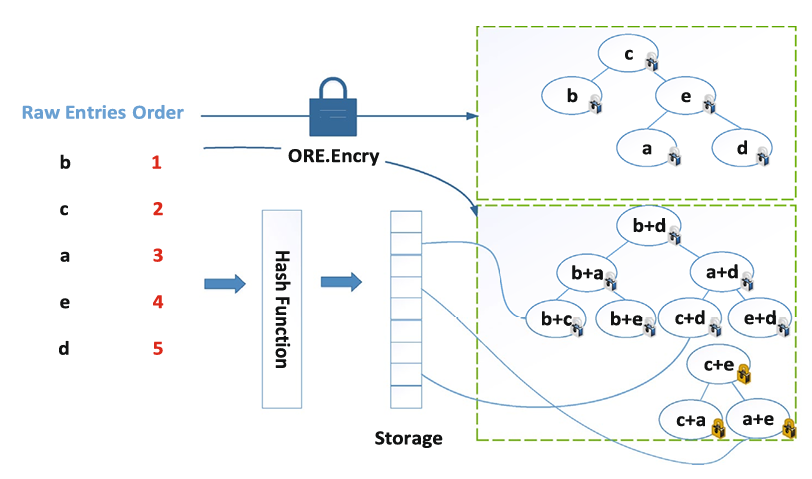
图3. 密文的完整存储架构
3. 查询处理
查询处理的过程如算法2所示,通过对每个维度的查询q[j]、查询倍增和2q[j]、原数据pα[j], pα[j]、数据和pα[j]+pα[j]进行加密,可以仅用密文的比较操作实现BNL算法,此过程不需要进行解密。
算法2. 加密Skyline查询算法

4. 维护问题
维护问题包括数据库记录的插入、删除和更新,这些操作都围绕AVL树这一数据结构进行。
插入时,首先需要对新插入的记录进行加密,然后求出新的加密数据和,根据数据和在OOC的位置,使用不同的密钥进行加密。每一组OOC都是一棵AVL树,还需要在AVL树中根据大小进行插入操作。图4展示了插入的具体流程。
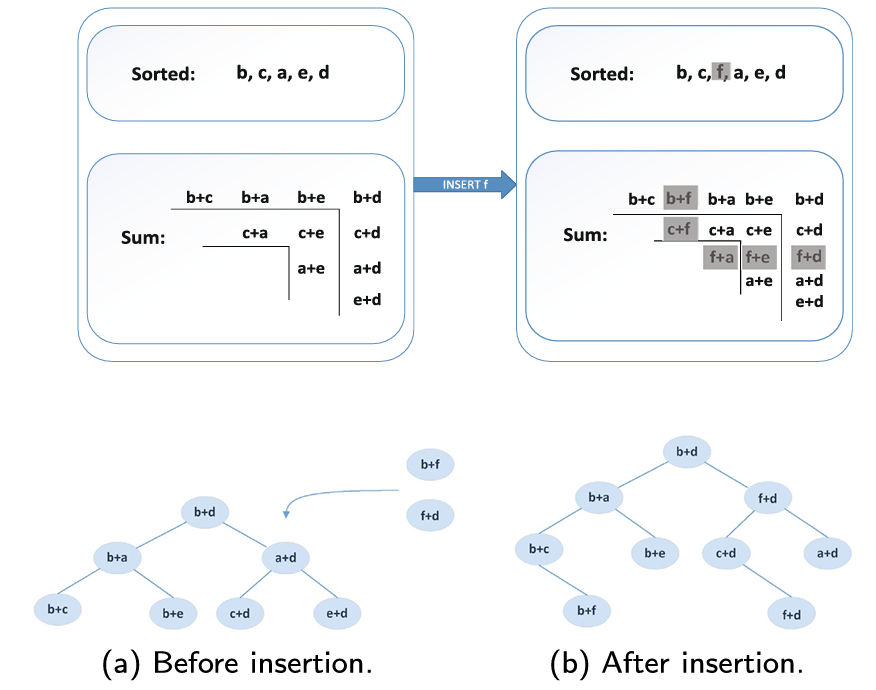
图4. 数据库插入示例
删除的过程和插入类似,在移除被删数据密文的同时,也要移除对应的加密数据和,然后在AVL树中进行删除。
在密文存储架构中不支持更新操作,而是将更新操作视作删除现有的加密记录,然后插入一个新的加密记录。
论文还讨论了SCALE框架的安全性与复杂性,论文证明了该方案是安全的,并且采用AVL树存储索引的情况下,维护操作的复杂度为O (nlogn)。
5. DIST-SCALE
为了缩短并行计算系统中的查询时间,论文提出了两个变体:DIST-SCALE-S和DIST-SCALE-E,适用于主-从节点集群架构。主节点负责数据分配,从节点在其分区内执行SQ操作。处理查询请求分为两个阶段:第一阶段,各从节点运行SCALE算法生成本地SQ结果;第二阶段,主节点合并这些结果为全局SQ结果。
5.1 DIST-SCALE-S
DIST-SCALE-S将数据分区并分配给多个计算节点来实现DSQ查询。
处理过程如图5所示,假设t1 < t2 < … < tv,第一次合并在t2发生,节点1、2的DSQ结果合并为新的数据集P,类似的合并还在t4、t6时进行,结果称为layer-2分区,并立即被发送到空闲的从节点中(如t1),此时如果另一个从节点也空闲下来(例如t3),那么就会在这一对从节点中对layer-2分区进行查询,接着主节点将layer-2分区的本地DSQ结果合并为layer-3分区,以此类推,最终合并成一个分区。
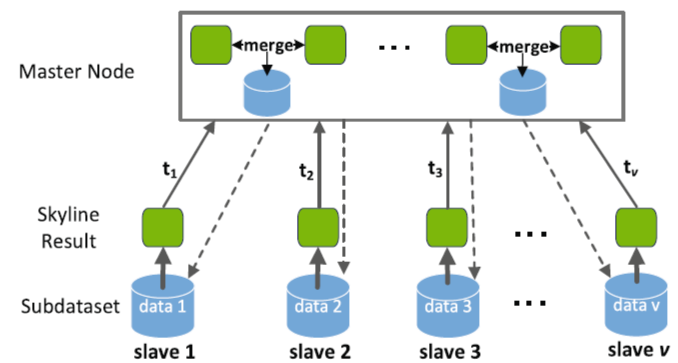
图5. 并行查询处理架构
5.2 DIST-SCALE-E
DIST-SCALE-E在DIST-SCALE-S的基础上进行了改进。主节点在生成上一层结果后不立即分配下一层任务,而是延迟至所有上一层结果生成后再重新分配。此方式避免了多个空闲从节点的出现。
DIST-SCALE-E区分了两种模式并在执行过程中切换:模式2用于“洗牌”,将结果均匀分成v个分区,确保每个从节点获得不同的数据子集;模式1用于解决处理时的无限循环,主节点将所有元组发送给一个空闲的从节点(即只有一个分区)。
模式切换的目的是为了使得分区数量减少,并最终只剩下一个分区。假设在第i层的时候需要切换到模式1,那么相比于第i层使用模式2,到第i+1层才使用模式1,需要处理的分区数量应该满足:|S(i)|≤|S(i)|/v+|S(i+1)|,即|S(i)|/|S(i+1)|≥1-1/v。
此外,还应考虑最终在第i层切换到模式1时的分区数量不能过大,例如限制|S(i)|≤λ,将添加了该限制的SCALE变体称为DIST-SCALE-e。
实验效果

如图7所示,通过对DIST-SCALE-S、DIST-SCALE-E、DIST-SCALE-e三种并行SCALE框架变体的比较,实验结果表明这些变体显著提高了可扩展性,处理大数据集时具有更小的时间开销。DIST-SCALE-e展现了最佳的整体性能。
此外模式转换阈值的合理性得到了验证,随着层数增大,相邻层分区数量之比|S(i)|/|S(i+1)|逐渐靠近1-1/v,这证明该理论是合理的,但是分区数量λ的设定仍需具体情况具体分析。
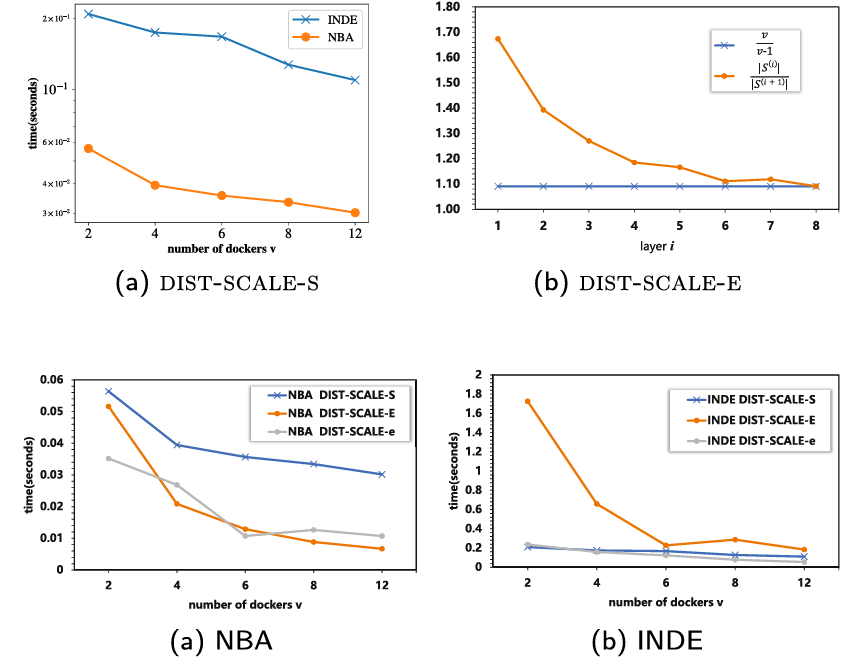
图7. 三种SCALE变体的比较与模式切换的理论分析结果
3. 维护开销
为了证明AVL树作为数据结构的合理性,论文对比了链表、AVL树和红黑树的性能。结果显示链表性能最差,而红黑树和AVL树表现相近,前者在插入和删除效率上略优,但查询性能较低。需要在维护成本和查询性能之间进行权衡。
结语
作者简介








期刊简介

