一 简介
二 pvController 初始化
初始化 eventRecorder
初始化 PersistentVolumeController 对象,
调用 VolumePluginMgr.InitPlugins() 方法 初始化存储插件,代码存在于 pkg/volume/plugins.go 文件中
开始创建 informer 监听集群内的资源,初始化了如下 informer
PersistentVolumeInformer PersistentVolumeClaimInformer StorageClassInformer PodInformer NodeInformer
将 PV & PVC 的 event 分别放入 volumeQueue & claimQueue
为了不每次都迭代 pods ,自定义一个通过 pvc 键索引 pod 的索引器
初始化 intree 存储 -> csi 迁移相关功能的 manager
三 开始运行
// 开始运行 pvControllerfunc (ctrl *PersistentVolumeController) Run(stopCh <-chan struct{}) {defer utilruntime.HandleCrash()defer ctrl.claimQueue.ShutDown()defer ctrl.volumeQueue.ShutDown()klog.Infof("Starting persistent volume controller")defer klog.Infof("Shutting down persistent volume controller")if !cache.WaitForNamedCacheSync("persistent volume", stopCh, ctrl.volumeListerSynced, ctrl.claimListerSynced, ctrl.classListerSynced, ctrl.podListerSynced, ctrl.NodeListerSynced) {return}ctrl.initializeCaches(ctrl.volumeLister, ctrl.claimLister)go wait.Until(ctrl.resync, ctrl.resyncPeriod, stopCh)go wait.Until(ctrl.volumeWorker, time.Second, stopCh)go wait.Until(ctrl.claimWorker, time.Second, stopCh)metrics.Register(ctrl.volumes.store, ctrl.claims, &ctrl.volumePluginMgr)<-stopCh}
func (ctrl *PersistentVolumeController) initializeCaches(volumeLister corelisters.PersistentVolumeLister, claimLister corelisters.PersistentVolumeClaimLister) {// 这里不访问 apiserver,是从本地缓存拿出的对象,这些对象不可以被外部函数修改volumeList, err := volumeLister.List(labels.Everything())if err != nil {klog.Errorf("PersistentVolumeController can't initialize caches: %v", err)return}for _, volume := range volumeList {// 我们不能改变 volume 对象,所以这里我们copy一份新对象,对新对象进行操作volumeClone := volume.DeepCopy()if _, err = ctrl.storeVolumeUpdate(volumeClone); err != nil {klog.Errorf("error updating volume cache: %v", err)}}claimList, err := claimLister.List(labels.Everything())if err != nil {klog.Errorf("PersistentVolumeController can't initialize caches: %v", err)return}for _, claim := range claimList {if _, err = ctrl.storeClaimUpdate(claim.DeepCopy()); err != nil {klog.Errorf("error updating claim cache: %v", err)}}klog.V(4).Infof("controller initialized")}type persistentVolumeOrderedIndex struct {store cache.Indexer}
1 resync
func (ctrl *PersistentVolumeController) resync() {klog.V(4).Infof("resyncing PV controller")pvcs, err := ctrl.claimLister.List(labels.NewSelector())if err != nil {klog.Warningf("cannot list claims: %s", err)return}for _, pvc := range pvcs {ctrl.enqueueWork(ctrl.claimQueue, pvc)}pvs, err := ctrl.volumeLister.List(labels.NewSelector())if err != nil {klog.Warningf("cannot list persistent volumes: %s", err)return}for _, pv := range pvs {ctrl.enqueueWork(ctrl.volumeQueue, pv)}}
2 volumeWorker
workFunc := func() bool {keyObj, quit := ctrl.volumeQueue.Get()if quit {return true}defer ctrl.volumeQueue.Done(keyObj)key := keyObj.(string)klog.V(5).Infof("volumeWorker[%s]", key)_, name, err := cache.SplitMetaNamespaceKey(key)if err != nil {klog.V(4).Infof("error getting name of volume %q to get volume from informer: %v", key, err)return false}volume, err := ctrl.volumeLister.Get(name)if err == nil {// The volume still exists in informer cache, the event must have// been add/update/syncctrl.updateVolume(volume)return false}if !errors.IsNotFound(err) {klog.V(2).Infof("error getting volume %q from informer: %v", key, err)return false}// The volume is not in informer cache, the event must have been// "delete"volumeObj, found, err := ctrl.volumes.store.GetByKey(key)if err != nil {klog.V(2).Infof("error getting volume %q from cache: %v", key, err)return false}if !found {// The controller has already processed the delete event and// deleted the volume from its cacheklog.V(2).Infof("deletion of volume %q was already processed", key)return false}volume, ok := volumeObj.(*v1.PersistentVolume)if !ok {klog.Errorf("expected volume, got %+v", volumeObj)return false}ctrl.deleteVolume(volume)return false}
updateVolume
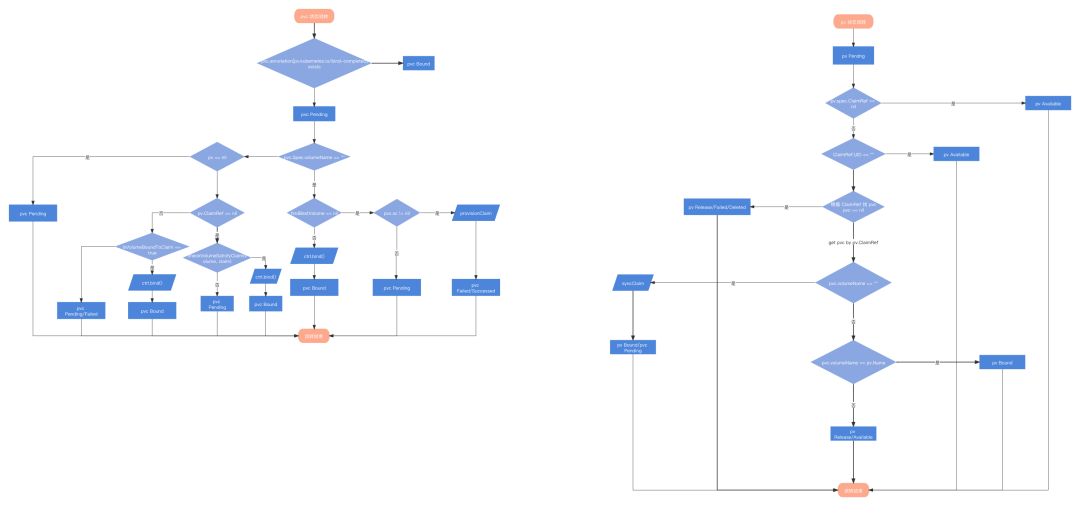
func (ctrl *PersistentVolumeController) syncVolume(ctx context.Context, volume *v1.PersistentVolume) error {klog.V(4).Infof("synchronizing PersistentVolume[%s]: %s", volume.Name, getVolumeStatusForLogging(volume))...// [Unit test set 4]if volume.Spec.ClaimRef == nil {// Volume is unusedklog.V(4).Infof("synchronizing PersistentVolume[%s]: volume is unused", volume.Name)if _, err := ctrl.updateVolumePhase(volume, v1.VolumeAvailable, ""); err != nil {// Nothing was saved; we will fall back into the same// condition in the next call to this methodreturn err}return nil} else /* pv.Spec.ClaimRef != nil */ {// Volume is bound to a claim.if volume.Spec.ClaimRef.UID == "" {// The PV is reserved for a PVC; that PVC has not yet been// bound to this PV; the PVC sync will handle it.klog.V(4).Infof("synchronizing PersistentVolume[%s]: volume is pre-bound to claim %s", volume.Name, claimrefToClaimKey(volume.Spec.ClaimRef))if _, err := ctrl.updateVolumePhase(volume, v1.VolumeAvailable, ""); err != nil {// Nothing was saved; we will fall back into the same// condition in the next call to this methodreturn err}return nil}klog.V(4).Infof("synchronizing PersistentVolume[%s]: volume is bound to claim %s", volume.Name, claimrefToClaimKey(volume.Spec.ClaimRef))// Get the PVC by _name_var claim *v1.PersistentVolumeClaimclaimName := claimrefToClaimKey(volume.Spec.ClaimRef)obj, found, err := ctrl.claims.GetByKey(claimName)if err != nil {return err}if !found {if volume.Status.Phase != v1.VolumeReleased && volume.Status.Phase != v1.VolumeFailed {obj, err = ctrl.claimLister.PersistentVolumeClaims(volume.Spec.ClaimRef.Namespace).Get(volume.Spec.ClaimRef.Name)if err != nil && !apierrors.IsNotFound(err) {return err}found = !apierrors.IsNotFound(err)if !found {obj, err = ctrl.kubeClient.CoreV1().PersistentVolumeClaims(volume.Spec.ClaimRef.Namespace).Get(context.TODO(), volume.Spec.ClaimRef.Name, metav1.GetOptions{})if err != nil && !apierrors.IsNotFound(err) {return err}found = !apierrors.IsNotFound(err)}}}if !found {klog.V(4).Infof("synchronizing PersistentVolume[%s]: claim %s not found", volume.Name, claimrefToClaimKey(volume.Spec.ClaimRef))// Fall through with claim = nil} else {var ok boolclaim, ok = obj.(*v1.PersistentVolumeClaim)if !ok {return fmt.Errorf("cannot convert object from volume cache to volume %q!?: %#v", claim.Spec.VolumeName, obj)}klog.V(4).Infof("synchronizing PersistentVolume[%s]: claim %s found: %s", volume.Name, claimrefToClaimKey(volume.Spec.ClaimRef), getClaimStatusForLogging(claim))}if claim != nil && claim.UID != volume.Spec.ClaimRef.UID {klog.V(4).Infof("Maybe cached claim: %s is not the newest one, we should fetch it from apiserver", claimrefToClaimKey(volume.Spec.ClaimRef))claim, err = ctrl.kubeClient.CoreV1().PersistentVolumeClaims(volume.Spec.ClaimRef.Namespace).Get(context.TODO(), volume.Spec.ClaimRef.Name, metav1.GetOptions{})if err != nil && !apierrors.IsNotFound(err) {return err} else if claim != nil {// Treat the volume as bound to a missing claim.if claim.UID != volume.Spec.ClaimRef.UID {klog.V(4).Infof("synchronizing PersistentVolume[%s]: claim %s has a newer UID than pv.ClaimRef, the old one must have been deleted", volume.Name, claimrefToClaimKey(volume.Spec.ClaimRef))claim = nil} else {klog.V(4).Infof("synchronizing PersistentVolume[%s]: claim %s has a same UID with pv.ClaimRef", volume.Name, claimrefToClaimKey(volume.Spec.ClaimRef))}}}if claim == nil {if volume.Status.Phase != v1.VolumeReleased && volume.Status.Phase != v1.VolumeFailed {// Also, log this only once:klog.V(2).Infof("volume %q is released and reclaim policy %q will be executed", volume.Name, volume.Spec.PersistentVolumeReclaimPolicy)if volume, err = ctrl.updateVolumePhase(volume, v1.VolumeReleased, ""); err != nil {// Nothing was saved; we will fall back into the same condition// in the next call to this methodreturn err}}if err = ctrl.reclaimVolume(volume); err != nil {// Release failed, we will fall back into the same condition// in the next call to this methodreturn err}if volume.Spec.PersistentVolumeReclaimPolicy == v1.PersistentVolumeReclaimRetain {// volume is being retained, it references a claim that does not exist now.klog.V(4).Infof("PersistentVolume[%s] references a claim %q (%s) that is not found", volume.Name, claimrefToClaimKey(volume.Spec.ClaimRef), volume.Spec.ClaimRef.UID)}return nil} else if claim.Spec.VolumeName == "" {if pvutil.CheckVolumeModeMismatches(&claim.Spec, &volume.Spec) {volumeMsg := fmt.Sprintf("Cannot bind PersistentVolume to requested PersistentVolumeClaim %q due to incompatible volumeMode.", claim.Name)ctrl.eventRecorder.Event(volume, v1.EventTypeWarning, events.VolumeMismatch, volumeMsg)claimMsg := fmt.Sprintf("Cannot bind PersistentVolume %q to requested PersistentVolumeClaim due to incompatible volumeMode.", volume.Name)ctrl.eventRecorder.Event(claim, v1.EventTypeWarning, events.VolumeMismatch, claimMsg)// Skipping syncClaimreturn nil}if metav1.HasAnnotation(volume.ObjectMeta, pvutil.AnnBoundByController) {// The binding is not completed; let PVC sync handle itklog.V(4).Infof("synchronizing PersistentVolume[%s]: volume not bound yet, waiting for syncClaim to fix it", volume.Name)} else {// Dangling PV; try to re-establish the link in the PVC syncklog.V(4).Infof("synchronizing PersistentVolume[%s]: volume was bound and got unbound (by user?), waiting for syncClaim to fix it", volume.Name)}ctrl.claimQueue.Add(claimToClaimKey(claim))return nil} else if claim.Spec.VolumeName == volume.Name {// Volume is bound to a claim properly, update status if necessaryklog.V(4).Infof("synchronizing PersistentVolume[%s]: all is bound", volume.Name)if _, err = ctrl.updateVolumePhase(volume, v1.VolumeBound, ""); err != nil {// Nothing was saved; we will fall back into the same// condition in the next call to this methodreturn err}return nil} else {// Volume is bound to a claim, but the claim is bound elsewhereif metav1.HasAnnotation(volume.ObjectMeta, pvutil.AnnDynamicallyProvisioned) && volume.Spec.PersistentVolumeReclaimPolicy == v1.PersistentVolumeReclaimDelete {if volume.Status.Phase != v1.VolumeReleased && volume.Status.Phase != v1.VolumeFailed {// Also, log this only once:klog.V(2).Infof("dynamically volume %q is released and it will be deleted", volume.Name)if volume, err = ctrl.updateVolumePhase(volume, v1.VolumeReleased, ""); err != nil {// Nothing was saved; we will fall back into the same condition// in the next call to this methodreturn err}}if err = ctrl.reclaimVolume(volume); err != nil {return err}return nil} else {if metav1.HasAnnotation(volume.ObjectMeta, pvutil.AnnBoundByController) {klog.V(4).Infof("synchronizing PersistentVolume[%s]: volume is bound by controller to a claim that is bound to another volume, unbinding", volume.Name)if err = ctrl.unbindVolume(volume); err != nil {return err}return nil} else {// The PV must have been created with this ptr; leave it alone.klog.V(4).Infof("synchronizing PersistentVolume[%s]: volume is bound by user to a claim that is bound to another volume, waiting for the claim to get unbound", volume.Name)if err = ctrl.unbindVolume(volume); err != nil {return err}return nil}}}}}
当Spec.ClaimRef.UID 为空的时候,说明 pvc 还未绑定 pv, 调用ctrl.updateVolumePhase 使得 pv 进入 Available 状态, 方法返回,等待 pvc syncClaim 方法处理
使用 Spec.ClaimRef 相关的 pvc 信息获取 pv_controller缓存的pvc
如果 pvc 没有找到
有可能是集群压力过大缓存没有更新,则进一步从 informercache 中找,如果 informercache里面还是没有的话则进一步从apiserver中去找
这里如果发现 非 Released & 非 Failed 的pv 经过上述步骤仍然找不到 pvc 的话,说明 pvc 被删除。在最新的kubernetes 版本中会检查reclaimPoilcy,对 pv的状态进行处理
找到 pvc 之后
检查 pvc的 volumeMode 和 pv 的 volumeMode是否一致,不一致报 event 出来
如果发现有这个 pv 有 AnnBoundByController = "pv.kubernetes.io/bound-by-controller" 这个annotation 说明 pvc/pv 流程正在绑定中
将 pvc 放到 claimQueue 里面, 让 claimWorker 进行处理
如果是 pv 是动态创建的情况下,并且 pv 的 ReclaimPolicy 是 delete 的情况下, 说明 pvc 已经绑定了其他pv, 将 pv 置为 released 的状态, 等待deleters 删除
如果 pv 不是动态创建的情况下,将 pv 的 ClaimRef 字段置为空,将其 unbound 掉
3 claimWorker
workFunc := func() bool {keyObj, quit := ctrl.claimQueue.Get()if quit {return true}defer ctrl.claimQueue.Done(keyObj)key := keyObj.(string)klog.V(5).Infof("claimWorker[%s]", key)namespace, name, err := cache.SplitMetaNamespaceKey(key)if err != nil {klog.V(4).Infof("error getting namespace & name of claim %q to get claim from informer: %v", key, err)return false}claim, err := ctrl.claimLister.PersistentVolumeClaims(namespace).Get(name)if err == nil {// The claim still exists in informer cache, the event must have// been add/update/syncctrl.updateClaim(claim)return false}if !errors.IsNotFound(err) {klog.V(2).Infof("error getting claim %q from informer: %v", key, err)return false}// The claim is not in informer cache, the event must have been "delete"claimObj, found, err := ctrl.claims.GetByKey(key)if err != nil {klog.V(2).Infof("error getting claim %q from cache: %v", key, err)return false}if !found {// The controller has already processed the delete event and// deleted the claim from its cacheklog.V(2).Infof("deletion of claim %q was already processed", key)return false}claim, ok := claimObj.(*v1.PersistentVolumeClaim)if !ok {klog.Errorf("expected claim, got %+v", claimObj)return false}ctrl.deleteClaim(claim)return false}
syncUnboundClaim
func (ctrl *PersistentVolumeController) syncUnboundClaim(ctx context.Context, claim *v1.PersistentVolumeClaim) error {if claim.Spec.VolumeName == "" {// User did not care which PV they get.delayBinding, err := pvutil.IsDelayBindingMode(claim, ctrl.classLister)if err != nil {return err}// [Unit test set 1]volume, err := ctrl.volumes.findBestMatchForClaim(claim, delayBinding)if err != nil {klog.V(2).Infof("synchronizing unbound PersistentVolumeClaim[%s]: Error finding PV for claim: %v", claimToClaimKey(claim), err)return fmt.Errorf("error finding PV for claim %q: %w", claimToClaimKey(claim), err)}if volume == nil {klog.V(4).Infof("synchronizing unbound PersistentVolumeClaim[%s]: no volume found", claimToClaimKey(claim))switch {case delayBinding && !pvutil.IsDelayBindingProvisioning(claim):if err = ctrl.emitEventForUnboundDelayBindingClaim(claim); err != nil {return err}case storagehelpers.GetPersistentVolumeClaimClass(claim) != "":if err = ctrl.provisionClaim(ctx, claim); err != nil {return err}return nildefault:ctrl.eventRecorder.Event(claim, v1.EventTypeNormal, events.FailedBinding, "no persistent volumes available for this claim and no storage class is set")}// Mark the claim as Pending and try to find a match in the next// periodic syncClaimif _, err = ctrl.updateClaimStatus(claim, v1.ClaimPending, nil); err != nil {return err}return nil} else /* pv != nil */ {// Found a PV for this claim// OBSERVATION: pvc is "Pending", pv is "Available"claimKey := claimToClaimKey(claim)klog.V(4).Infof("synchronizing unbound PersistentVolumeClaim[%s]: volume %q found: %s", claimKey, volume.Name, getVolumeStatusForLogging(volume))if err = ctrl.bind(volume, claim); err != nil {metrics.RecordMetric(claimKey, &ctrl.operationTimestamps, err)return err}metrics.RecordMetric(claimKey, &ctrl.operationTimestamps, nil)return nil}} else /* pvc.Spec.VolumeName != nil */ {klog.V(4).Infof("synchronizing unbound PersistentVolumeClaim[%s]: volume %q requested", claimToClaimKey(claim), claim.Spec.VolumeName)obj, found, err := ctrl.volumes.store.GetByKey(claim.Spec.VolumeName)if err != nil {return err}if !found {klog.V(4).Infof("synchronizing unbound PersistentVolumeClaim[%s]: volume %q requested and not found, will try again next time", claimToClaimKey(claim), claim.Spec.VolumeName)if _, err = ctrl.updateClaimStatus(claim, v1.ClaimPending, nil); err != nil {return err}return nil} else {volume, ok := obj.(*v1.PersistentVolume)if !ok {return fmt.Errorf("cannot convert object from volume cache to volume %q!?: %+v", claim.Spec.VolumeName, obj)}klog.V(4).Infof("synchronizing unbound PersistentVolumeClaim[%s]: volume %q requested and found: %s", claimToClaimKey(claim), claim.Spec.VolumeName, getVolumeStatusForLogging(volume))if volume.Spec.ClaimRef == nil {klog.V(4).Infof("synchronizing unbound PersistentVolumeClaim[%s]: volume is unbound, binding", claimToClaimKey(claim))if err = checkVolumeSatisfyClaim(volume, claim); err != nil {klog.V(4).Infof("Can't bind the claim to volume %q: %v", volume.Name, err)// send an eventmsg := fmt.Sprintf("Cannot bind to requested volume %q: %s", volume.Name, err)ctrl.eventRecorder.Event(claim, v1.EventTypeWarning, events.VolumeMismatch, msg)// volume does not satisfy the requirements of the claimif _, err = ctrl.updateClaimStatus(claim, v1.ClaimPending, nil); err != nil {return err}} else if err = ctrl.bind(volume, claim); err != nil {// On any error saving the volume or the claim, subsequent// syncClaim will finish the binding.return err}// OBSERVATION: pvc is "Bound", pv is "Bound"return nil} else if pvutil.IsVolumeBoundToClaim(volume, claim) {// User asked for a PV that is claimed by this PVC// OBSERVATION: pvc is "Pending", pv is "Bound"klog.V(4).Infof("synchronizing unbound PersistentVolumeClaim[%s]: volume already bound, finishing the binding", claimToClaimKey(claim))// Finish the volume binding by adding claim UID.if err = ctrl.bind(volume, claim); err != nil {return err}// OBSERVATION: pvc is "Bound", pv is "Bound"return nil} else {// User asked for a PV that is claimed by someone else// OBSERVATION: pvc is "Pending", pv is "Bound"if !metav1.HasAnnotation(claim.ObjectMeta, pvutil.AnnBoundByController) {klog.V(4).Infof("synchronizing unbound PersistentVolumeClaim[%s]: volume already bound to different claim by user, will retry later", claimToClaimKey(claim))claimMsg := fmt.Sprintf("volume %q already bound to a different claim.", volume.Name)ctrl.eventRecorder.Event(claim, v1.EventTypeWarning, events.FailedBinding, claimMsg)// User asked for a specific PV, retry laterif _, err = ctrl.updateClaimStatus(claim, v1.ClaimPending, nil); err != nil {return err}return nil} else {klog.V(4).Infof("synchronizing unbound PersistentVolumeClaim[%s]: volume already bound to different claim %q by controller, THIS SHOULD NEVER HAPPEN", claimToClaimKey(claim), claimrefToClaimKey(volume.Spec.ClaimRef))claimMsg := fmt.Sprintf("volume %q already bound to a different claim.", volume.Name)ctrl.eventRecorder.Event(claim, v1.EventTypeWarning, events.FailedBinding, claimMsg)return fmt.Errorf("invalid binding of claim %q to volume %q: volume already claimed by %q", claimToClaimKey(claim), claim.Spec.VolumeName, claimrefToClaimKey(volume.Spec.ClaimRef))}}}}}
如果当前 pvc 的 volumeName 为空
判断当前pvc 是否是延迟绑定的
调用 volume, err := ctrl.volumes.findBestMatchForClaim(claim, delayBinding) 找出对应的 pv
如果找到 volume 的话
调用 ctrl.bind(volume, claim) 方法进行绑定
如果没有找到 volume 的话
如果是延迟绑定, 并且还未触发(pod 未引用)则 emit event 到 pvc 上
如果 pvc 绑定了 sc, 调用 ctrl.provisionClaim(ctx, claim) 方法
分析 pvc yaml, 找到 provisioner driver
启动一个 goroutine
调用 ctrl.provisionClaimOperation(ctx, claim, plugin, storageClass) 进行创建工作
provisionClaimOperation
func (ctrl *PersistentVolumeController) provisionClaimOperation(ctx context.Context,claim *v1.PersistentVolumeClaim,plugin vol.ProvisionableVolumePlugin,storageClass *storage.StorageClass) (string, error) {claimClass := storagehelpers.GetPersistentVolumeClaimClass(claim)klog.V(4).Infof("provisionClaimOperation [%s] started, class: %q", claimToClaimKey(claim), claimClass)pluginName := plugin.GetPluginName()if pluginName != "kubernetes.io/csi" && claim.Spec.DataSource != nil {strerr := fmt.Sprintf("plugin %q is not a CSI plugin. Only CSI plugin can provision a claim with a datasource", pluginName)return pluginName, fmt.Errorf(strerr)}provisionerName := storageClass.Provisioner// Add provisioner annotation to be consistent with external provisioner workflownewClaim, err := ctrl.setClaimProvisioner(ctx, claim, provisionerName)if err != nil {// Save failed, the controller will retry in the next syncklog.V(2).Infof("error saving claim %s: %v", claimToClaimKey(claim), err)return pluginName, err}claim = newClaimpvName := ctrl.getProvisionedVolumeNameForClaim(claim)volume, err := ctrl.kubeClient.CoreV1().PersistentVolumes().Get(context.TODO(), pvName, metav1.GetOptions{})if err != nil && !apierrors.IsNotFound(err) {klog.V(3).Infof("error reading persistent volume %q: %v", pvName, err)return pluginName, err}if err == nil && volume != nil {// Volume has been already provisioned, nothing to do.klog.V(4).Infof("provisionClaimOperation [%s]: volume already exists, skipping", claimToClaimKey(claim))return pluginName, err}// Prepare a claimRef to the claim early (to fail before a volume is// provisioned)claimRef, err := ref.GetReference(scheme.Scheme, claim)if err != nil {klog.V(3).Infof("unexpected error getting claim reference: %v", err)return pluginName, err}// Gather provisioning optionstags := make(map[string]string)tags[CloudVolumeCreatedForClaimNamespaceTag] = claim.Namespacetags[CloudVolumeCreatedForClaimNameTag] = claim.Nametags[CloudVolumeCreatedForVolumeNameTag] = pvNameoptions := vol.VolumeOptions{PersistentVolumeReclaimPolicy: *storageClass.ReclaimPolicy,MountOptions: storageClass.MountOptions,CloudTags: &tags,ClusterName: ctrl.clusterName,PVName: pvName,PVC: claim,Parameters: storageClass.Parameters,}// Refuse to provision if the plugin doesn't support mount options, creation// of PV would be rejected by validation anywayif !plugin.SupportsMountOption() && len(options.MountOptions) > 0 {strerr := fmt.Sprintf("Mount options are not supported by the provisioner but StorageClass %q has mount options %v", storageClass.Name, options.MountOptions)klog.V(2).Infof("Mount options are not supported by the provisioner but claim %q's StorageClass %q has mount options %v", claimToClaimKey(claim), storageClass.Name, options.MountOptions)ctrl.eventRecorder.Event(claim, v1.EventTypeWarning, events.ProvisioningFailed, strerr)return pluginName, fmt.Errorf("provisioner %q doesn't support mount options", plugin.GetPluginName())}// Provision the volumeprovisioner, err := plugin.NewProvisioner(options)if err != nil {strerr := fmt.Sprintf("Failed to create provisioner: %v", err)klog.V(2).Infof("failed to create provisioner for claim %q with StorageClass %q: %v", claimToClaimKey(claim), storageClass.Name, err)ctrl.eventRecorder.Event(claim, v1.EventTypeWarning, events.ProvisioningFailed, strerr)return pluginName, err}var selectedNode *v1.Node = nilif nodeName, ok := claim.Annotations[pvutil.AnnSelectedNode]; ok {selectedNode, err = ctrl.NodeLister.Get(nodeName)if err != nil {strerr := fmt.Sprintf("Failed to get target node: %v", err)klog.V(3).Infof("unexpected error getting target node %q for claim %q: %v", nodeName, claimToClaimKey(claim), err)ctrl.eventRecorder.Event(claim, v1.EventTypeWarning, events.ProvisioningFailed, strerr)return pluginName, err}}allowedTopologies := storageClass.AllowedTopologiesopComplete := util.OperationCompleteHook(plugin.GetPluginName(), "volume_provision")volume, err = provisioner.Provision(selectedNode, allowedTopologies)opComplete(volumetypes.CompleteFuncParam{Err: &err})if err != nil {ctrl.rescheduleProvisioning(claim)strerr := fmt.Sprintf("Failed to provision volume with StorageClass %q: %v", storageClass.Name, err)klog.V(2).Infof("failed to provision volume for claim %q with StorageClass %q: %v", claimToClaimKey(claim), storageClass.Name, err)ctrl.eventRecorder.Event(claim, v1.EventTypeWarning, events.ProvisioningFailed, strerr)return pluginName, err}klog.V(3).Infof("volume %q for claim %q created", volume.Name, claimToClaimKey(claim))// Create Kubernetes PV object for the volume.if volume.Name == "" {volume.Name = pvName}// Bind it to the claimvolume.Spec.ClaimRef = claimRefvolume.Status.Phase = v1.VolumeBoundvolume.Spec.StorageClassName = claimClass// Add AnnBoundByController (used in deleting the volume)metav1.SetMetaDataAnnotation(&volume.ObjectMeta, pvutil.AnnBoundByController, "yes")metav1.SetMetaDataAnnotation(&volume.ObjectMeta, pvutil.AnnDynamicallyProvisioned, plugin.GetPluginName())// Try to create the PV object several timesfor i := 0; i < ctrl.createProvisionedPVRetryCount; i++ {klog.V(4).Infof("provisionClaimOperation [%s]: trying to save volume %s", claimToClaimKey(claim), volume.Name)var newVol *v1.PersistentVolumeif newVol, err = ctrl.kubeClient.CoreV1().PersistentVolumes().Create(context.TODO(), volume, metav1.CreateOptions{}); err == nil || apierrors.IsAlreadyExists(err) {// Save succeeded.if err != nil {klog.V(3).Infof("volume %q for claim %q already exists, reusing", volume.Name, claimToClaimKey(claim))err = nil} else {klog.V(3).Infof("volume %q for claim %q saved", volume.Name, claimToClaimKey(claim))_, updateErr := ctrl.storeVolumeUpdate(newVol)if updateErr != nil {// We will get an "volume added" event soon, this is not a big errorklog.V(4).Infof("provisionClaimOperation [%s]: cannot update internal cache: %v", volume.Name, updateErr)}}break}// Save failed, try again after a while.klog.V(3).Infof("failed to save volume %q for claim %q: %v", volume.Name, claimToClaimKey(claim), err)time.Sleep(ctrl.createProvisionedPVInterval)}if err != nil {strerr := fmt.Sprintf("Error creating provisioned PV object for claim %s: %v. Deleting the volume.", claimToClaimKey(claim), err)klog.V(3).Info(strerr)ctrl.eventRecorder.Event(claim, v1.EventTypeWarning, events.ProvisioningFailed, strerr)var deleteErr errorvar deleted boolfor i := 0; i < ctrl.createProvisionedPVRetryCount; i++ {_, deleted, deleteErr = ctrl.doDeleteVolume(volume)if deleteErr == nil && deleted {// Delete succeededklog.V(4).Infof("provisionClaimOperation [%s]: cleaning volume %s succeeded", claimToClaimKey(claim), volume.Name)break}if !deleted {klog.Errorf("Error finding internal deleter for volume plugin %q", plugin.GetPluginName())break}// Delete failed, try again after a while.klog.V(3).Infof("failed to delete volume %q: %v", volume.Name, deleteErr)time.Sleep(ctrl.createProvisionedPVInterval)}if deleteErr != nil {strerr := fmt.Sprintf("Error cleaning provisioned volume for claim %s: %v. Please delete manually.", claimToClaimKey(claim), deleteErr)klog.V(2).Info(strerr)ctrl.eventRecorder.Event(claim, v1.EventTypeWarning, events.ProvisioningCleanupFailed, strerr)}} else {klog.V(2).Infof("volume %q provisioned for claim %q", volume.Name, claimToClaimKey(claim))msg := fmt.Sprintf("Successfully provisioned volume %s using %s", volume.Name, plugin.GetPluginName())ctrl.eventRecorder.Event(claim, v1.EventTypeNormal, events.ProvisioningSucceeded, msg)}return pluginName, nil}
检查driver,只有 csi 类型的 driver 才允许使用 dataSource 字段
为 pvc 加 claim.Annotations["volume.kubernetes.io/storage-provisioner"] = class.Provisioner annotation
根据规则拼出 pv Name = "pvc-" + pvc.UID
如果找到了 pv, 则说明 pv已经存在,跳过 provision
收集pvc/pv 基本信息封装到 options 中
对 plugin 进行校验, 如果plugin不支持mount操作,则直接拒绝provision 请求
调用plugin.NewProvisioner(options) 创建 provisioner, 接口实现了Provision(selectedNode *v1.Node, allowedTopologies []v1.TopologySelectorTerm) 方法,注意,该方法为同步方法
Provision 方法返回了 PersistentVolume实例
为创建出来的 pv 关联 pvc 对象(ClaimRef),尝试创建 pv 对象 (重复多次)
如果创建 pv 失败,则尝试调用 Delete 方法删除创建的volume资源
func (ctrl *PersistentVolumeController) syncBoundClaim(claim *v1.PersistentVolumeClaim) error {if claim.Spec.VolumeName == "" {// Claim was bound before but not any more.if _, err := ctrl.updateClaimStatusWithEvent(claim, v1.ClaimLost, nil, v1.EventTypeWarning, "ClaimLost", "Bound claim has lost reference to PersistentVolume. Data on the volume is lost!"); err != nil {return err}return nil}obj, found, err := ctrl.volumes.store.GetByKey(claim.Spec.VolumeName)if err != nil {return err}if !found {// Claim is bound to a non-existing volume.if _, err = ctrl.updateClaimStatusWithEvent(claim, v1.ClaimLost, nil, v1.EventTypeWarning, "ClaimLost", "Bound claim has lost its PersistentVolume. Data on the volume is lost!"); err != nil {return err}return nil} else {volume, ok := obj.(*v1.PersistentVolume)if !ok {return fmt.Errorf("cannot convert object from volume cache to volume %q!?: %#v", claim.Spec.VolumeName, obj)}klog.V(4).Infof("synchronizing bound PersistentVolumeClaim[%s]: volume %q found: %s", claimToClaimKey(claim), claim.Spec.VolumeName, getVolumeStatusForLogging(volume))if volume.Spec.ClaimRef == nil {// Claim is bound but volume has come unbound.// Or, a claim was bound and the controller has not received updated// volume yet. We can't distinguish these cases.// Bind the volume again and set all states to Bound.klog.V(4).Infof("synchronizing bound PersistentVolumeClaim[%s]: volume is unbound, fixing", claimToClaimKey(claim))if err = ctrl.bind(volume, claim); err != nil {// Objects not saved, next syncPV or syncClaim will try againreturn err}return nil} else if volume.Spec.ClaimRef.UID == claim.UID {// All is well// NOTE: syncPV can handle this so it can be left out.// NOTE: bind() call here will do nothing in most cases as// everything should be already set.klog.V(4).Infof("synchronizing bound PersistentVolumeClaim[%s]: claim is already correctly bound", claimToClaimKey(claim))if err = ctrl.bind(volume, claim); err != nil {// Objects not saved, next syncPV or syncClaim will try againreturn err}return nil} else {// Claim is bound but volume has a different claimant.// Set the claim phase to 'Lost', which is a terminal// phase.if _, err = ctrl.updateClaimStatusWithEvent(claim, v1.ClaimLost, nil, v1.EventTypeWarning, "ClaimMisbound", "Two claims are bound to the same volume, this one is bound incorrectly"); err != nil {return err}return nil}}}
如果没找到, 说明 pvc 绑定了一个不存在的pv,报 event 并返回
如果找到了pv
检查 pv.Spec.ClaimRef 字段, 如果 为空,说明 pv 还没有绑定 pvc, 调用 ctrl.bind(volume, claim); 方法进行绑定 pv.ClaimRef.UID == pvc.UID, 调用 bind 方法,但是大多数情况会直接返回(因为所有的操作都已经做完了) 其他情况说明 volume 绑定了其他的 pvc, 更新pvc 的状态 为 lost 并报出 event
四 总结