使用Vmware虚拟机安装Ubuntu并安装ROS系统教程
所需资源:Ubuntu20.04镜像资源、Vmware软件(作者使用的是16pro版本)
一、使用Vmware虚拟机安装Ubuntu
1. Vmware软件可自行百度安装教程。
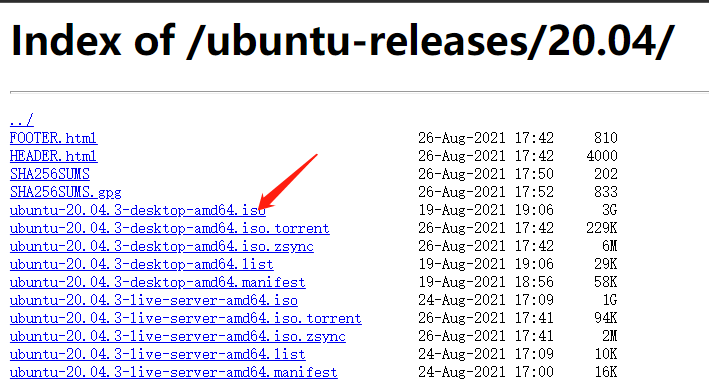
2. 需要下载Ubuntu的镜像资源,可以到浙江大学的镜像网址下载,如果去官方下载,会慢很多,网址:http://mirrors.zju.edu.cn/ubuntu-releases/20.04/。
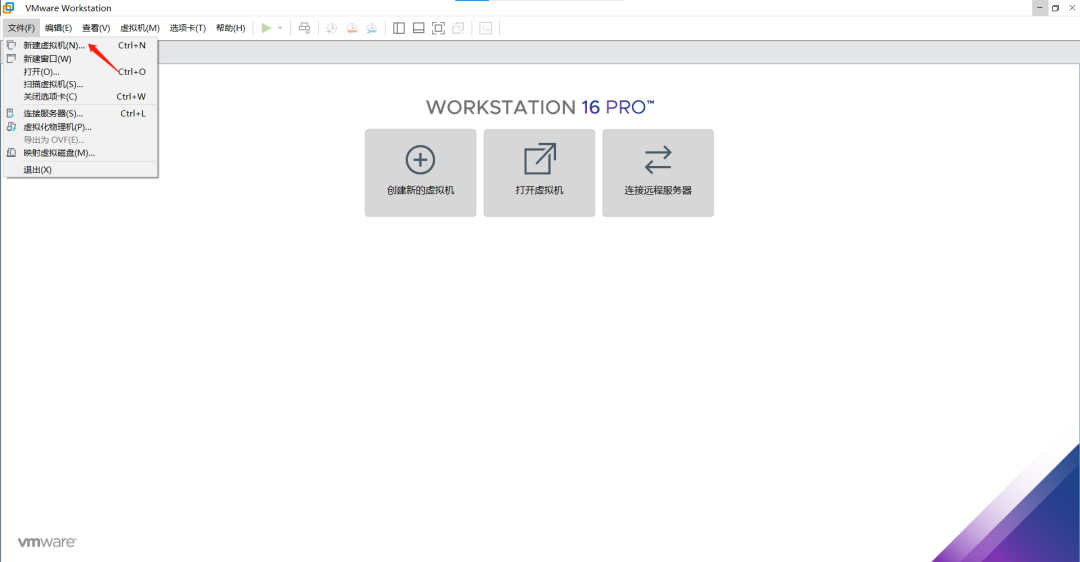
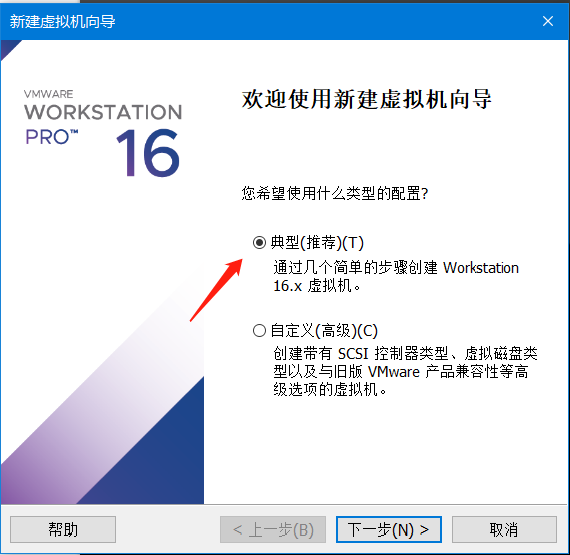
3. 打开Vmware,新建虚拟机
4. 选择“典型”,进入下一步
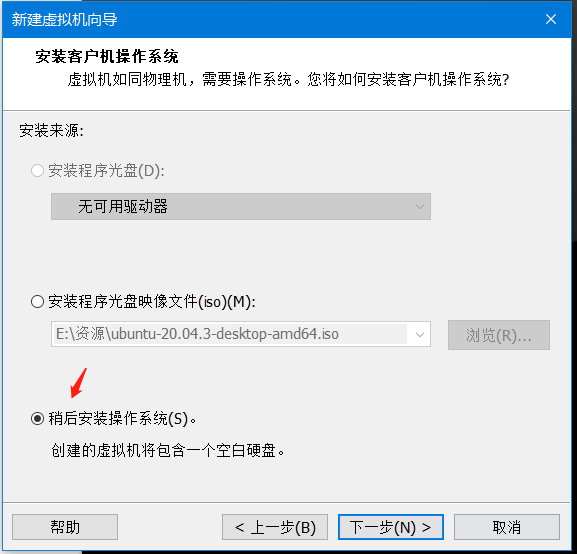
5. 选择“稍后安装操作系统”,进入下一步
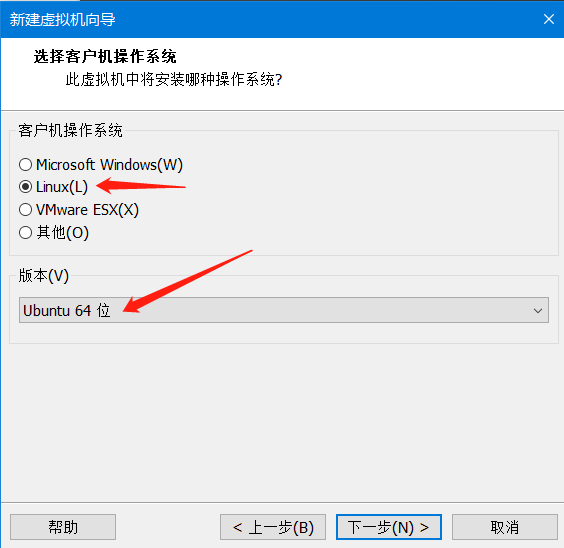
6. 这两个选项选择完以后进入下一步
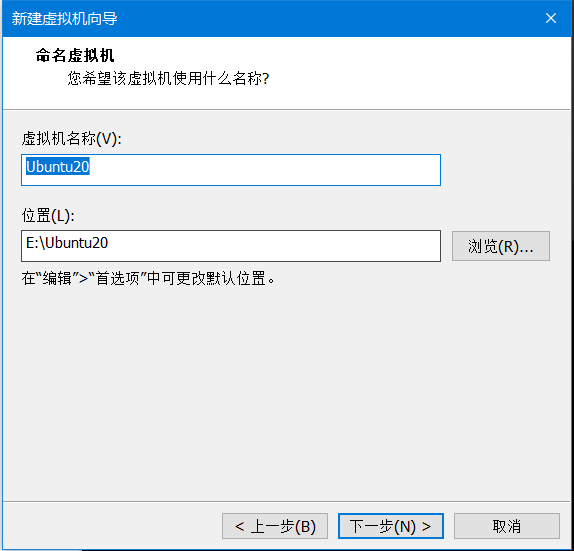
7. 建议安装在D或E盘
8. 最大磁盘大小建议40GB
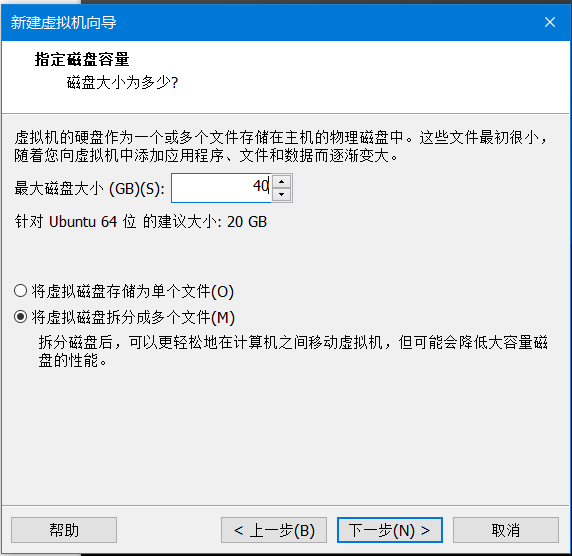
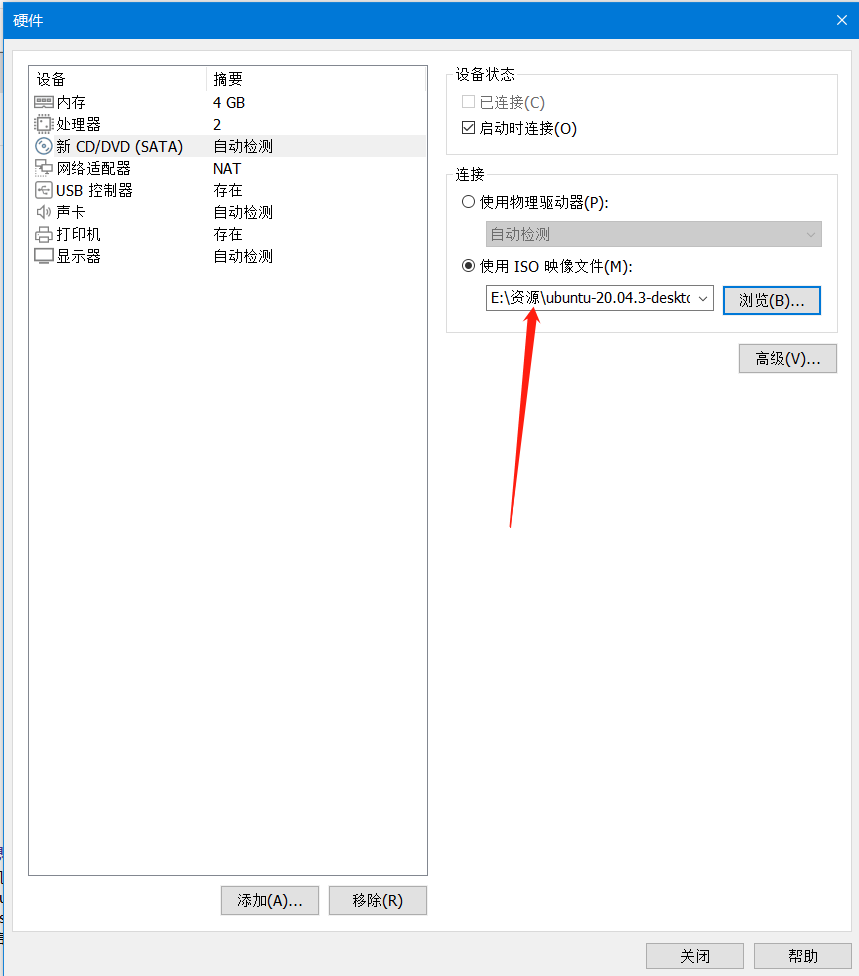
9. 选择“自定义硬件”
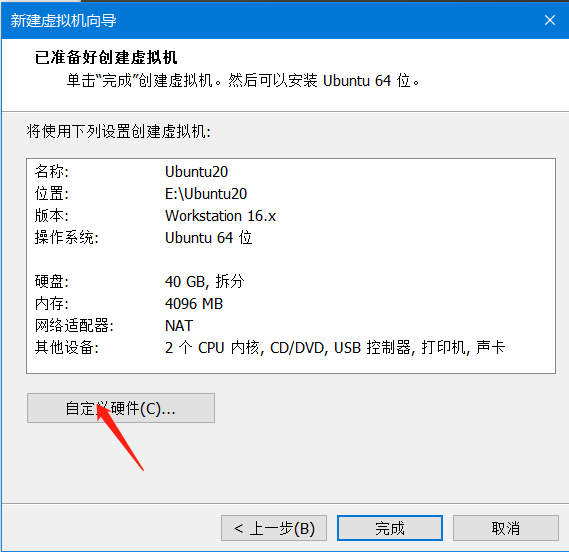
然后添加自己刚才下载的镜像文件,然后就完成了。
10. 点击“开启此虚拟机”,即可开始安装
11. 选择中文(简体),然后点击安装Ubuntu

12. 使用Tab键来选择(不知道为啥看不到下面的选项),大概按七次Tab,然后回车进入下一步
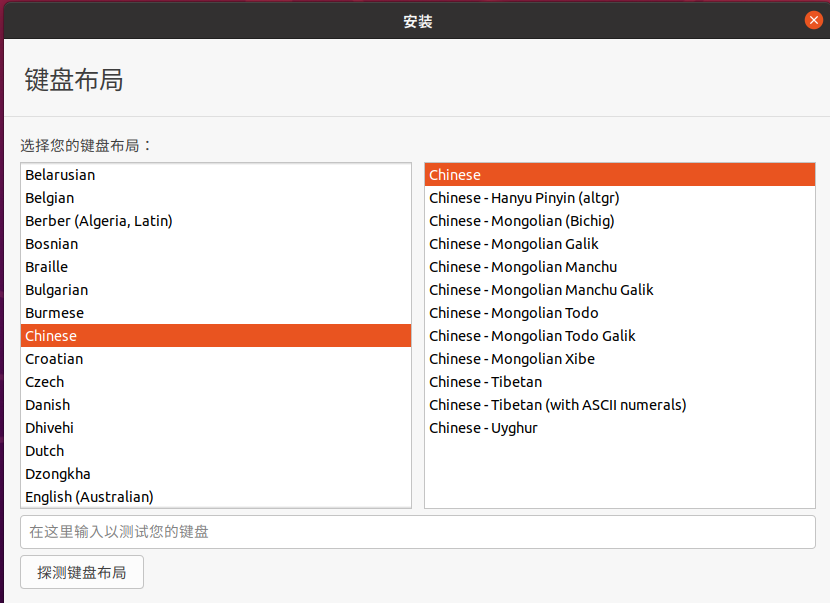
13. 选项选好后按六次Tab键,按回车进入下一步

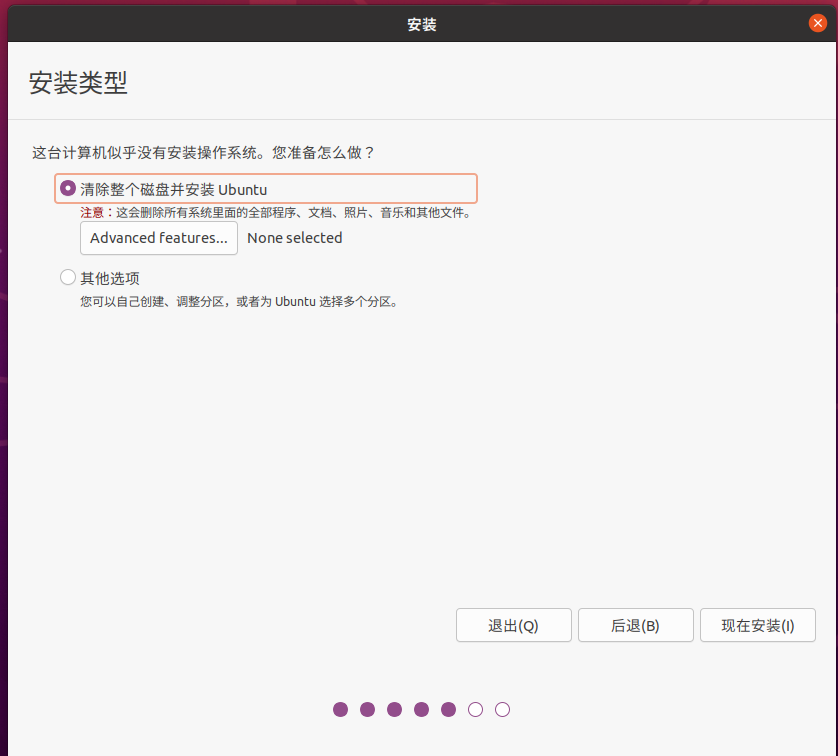
14. 后面界面就正常了,选择如图所示的选项,点击开始安装(会弹出一个窗口,默认点击继续)
15. 默认shanghai,点击继续

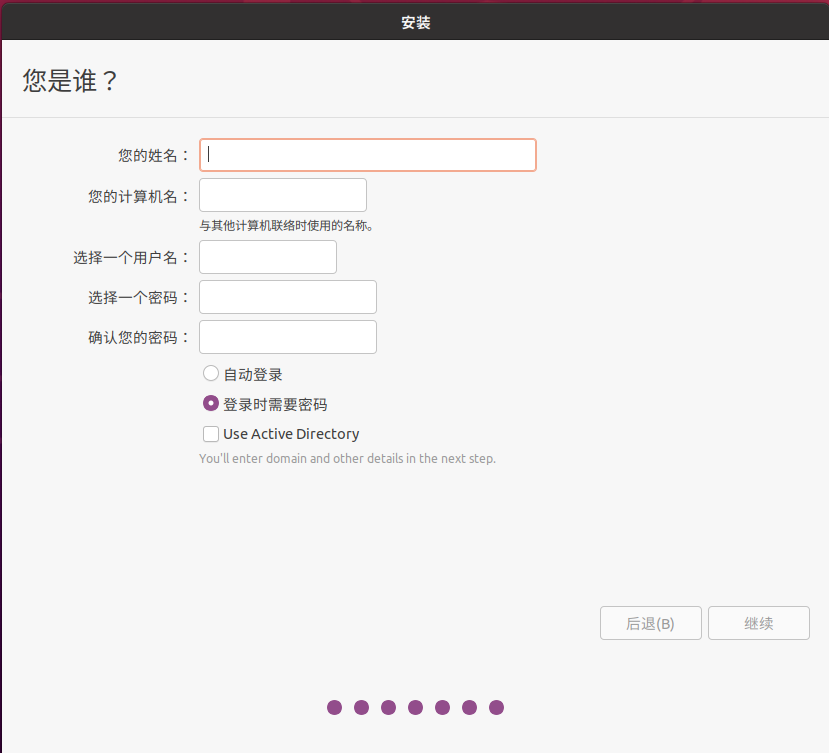
16. 然后输入你自己的信息,密码要记住,不能忘记,然后点击继续,接下来系统会开始安装,需要等待一段时间
17. 回车
18. 输入密码后可进入界面,为了方便虚拟机和电脑桌面之间的切换,需要安装Vmware tool,具体见详细教程:https://blog.csdn.net/engerla/article/details/83009677?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522164618877116780264011228%2522%252C%2522scm%2522%253A%252220140713.130102334..%2522%257D&request_id=164618877116780264011228&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~sobaiduend~default-2-83009677.pc_search_insert_ulrmf&utm_term=vmware%E5%AE%89%E8%A3%85vmware+tool&spm=1018.2226.3001.4187
这儿不过多赘述。
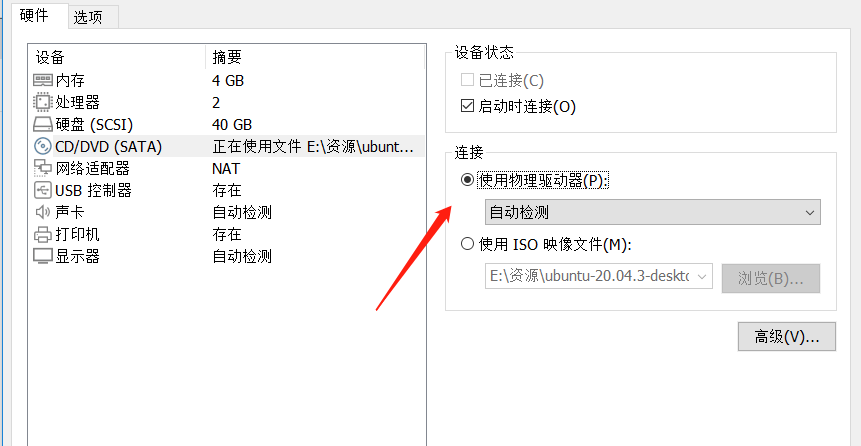
有些人可能以前安装过,无法重新安装Vmware tool,则需要关机,编辑虚拟机设置,选择使用物理驱动器,再开启虚拟机即可。然后按照上一步教程安装,若有弹出窗口,选择“是”
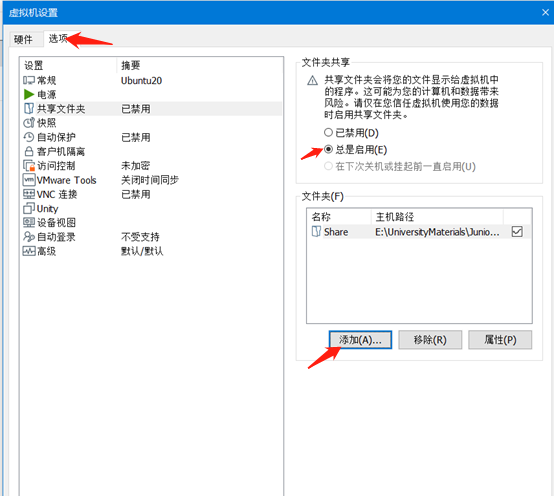
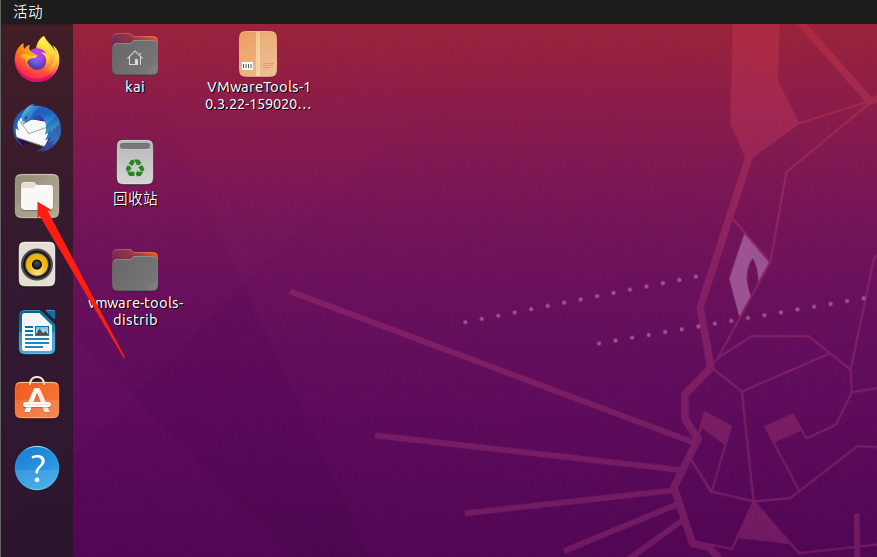
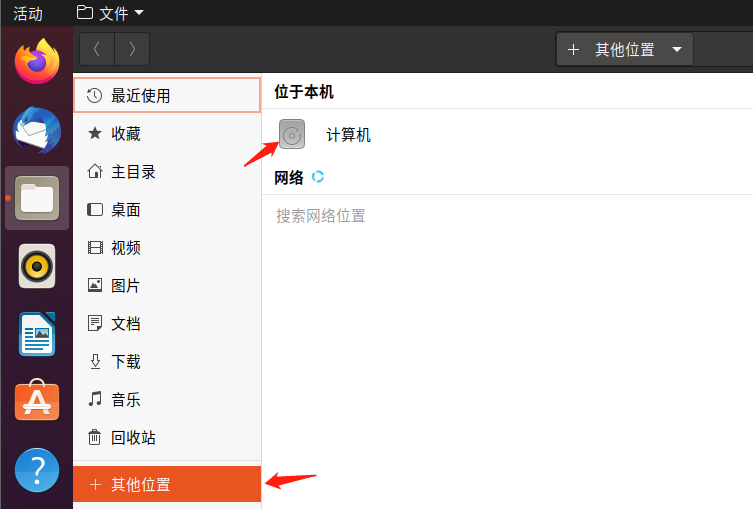
安装后关机,编辑虚拟机设置,点击选项,然后点击“总是启用”,添加路径(建议在D盘),然后点击确定,用于将电脑文件移动到虚拟机,然后重新开机,点击文件,然后点击计算机,进入根目录,打开mnt文件夹,再打开hgfs文件夹,里面就是创建的共享文件夹。
二、安装ROS系统
1. 首先我们需要更换软件源,提升下载速度,详见教程:https://zhuanlan.zhihu.com/p/142014944
若出现下列情况
输入
sudo apt install vim
再执行命令
sudo vim etc/apt/sources.list

2. 打开网址www.ros.org,按如图点击进入
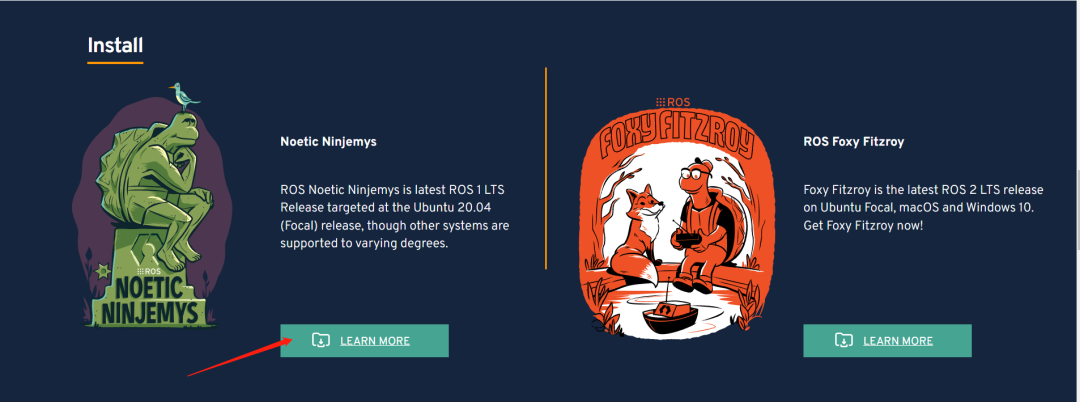
点击Ubuntu

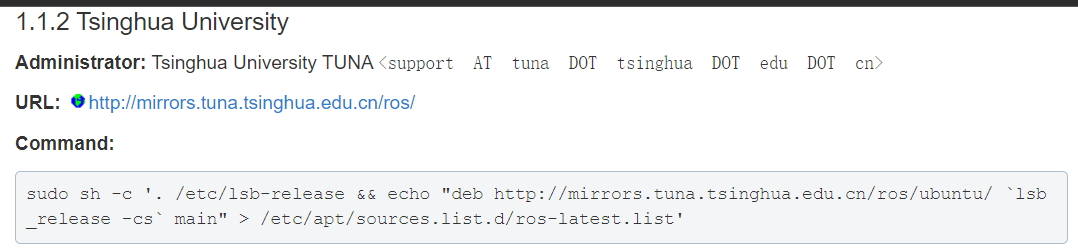
2. Setup your sources.list
点击这个,这个是镜像网址
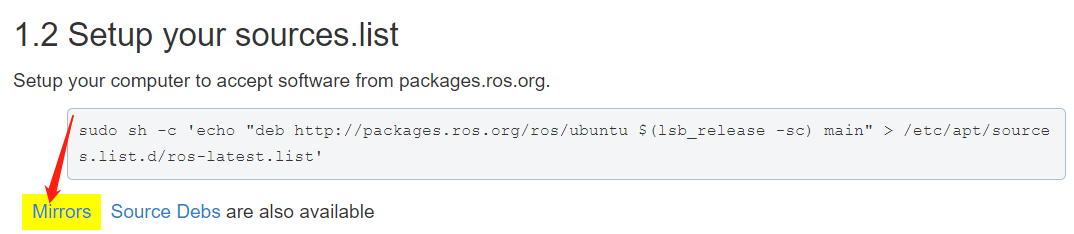
这儿我选择的是清华源
复制这段命令,在Ubuntu终端输入
3. Set up your keys
返回刚才的网址,依次输入两个命令


不过第二个命令现在失效了,可以改为输入这个命令:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654


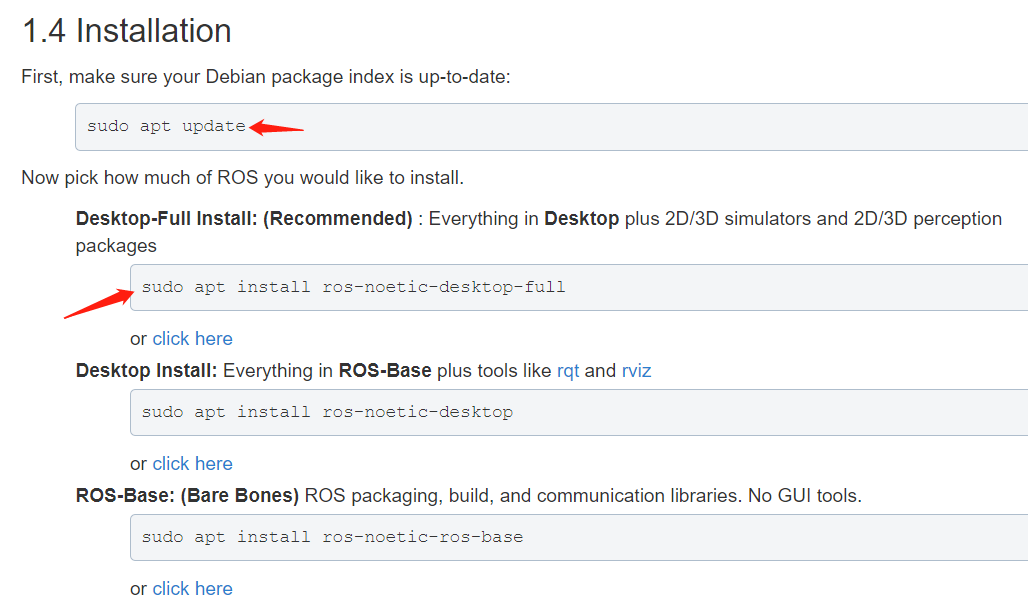
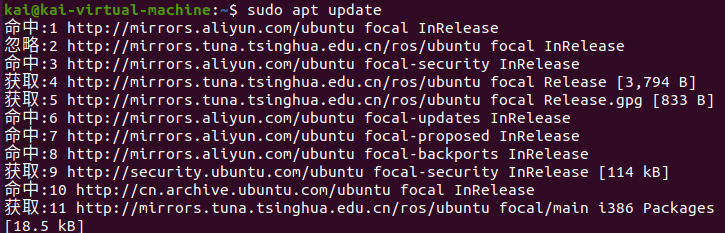
4. Installation
分别执行这两个命令,这可能需要10到30分钟

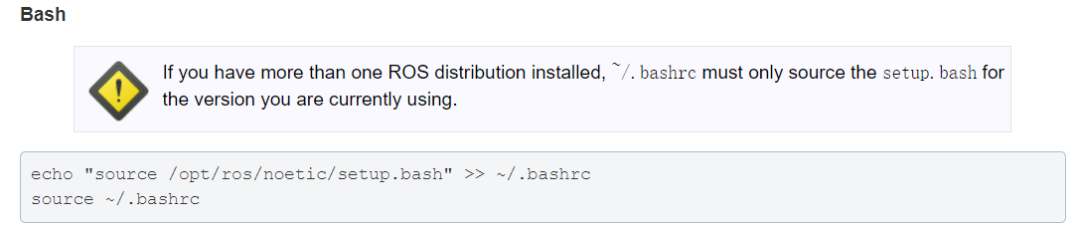
5. Environment setup
分别执行这两个命令

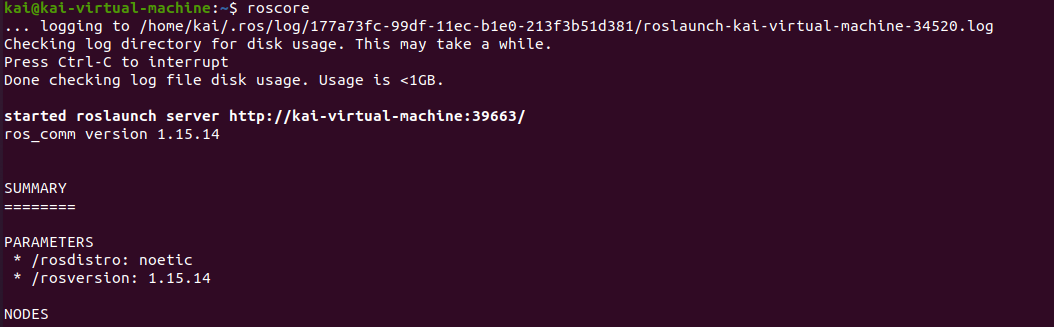
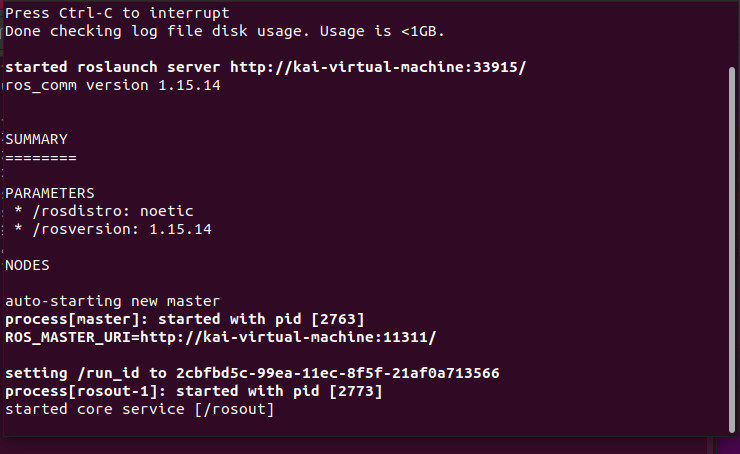
输入命令roscore,可以看到如下界面
6. Dependencies for building packages
还需要rosdep依赖包初始化,分别执行这四个命令
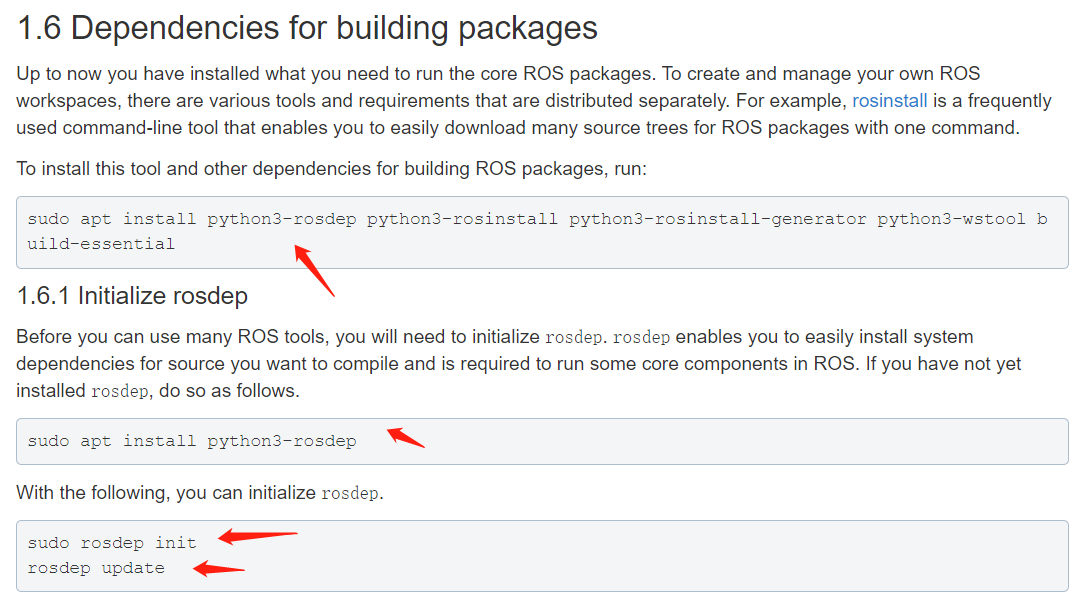

第二个命令如果已经安装,则不用输入

第三个命令如果出现如下错误,输入以下3个命令
sudo apt-get install python3-pip
sudo pip3 install 6-rosdep
sudo 6-rosdep
然后继续输入上面两个命令
成功界面如下
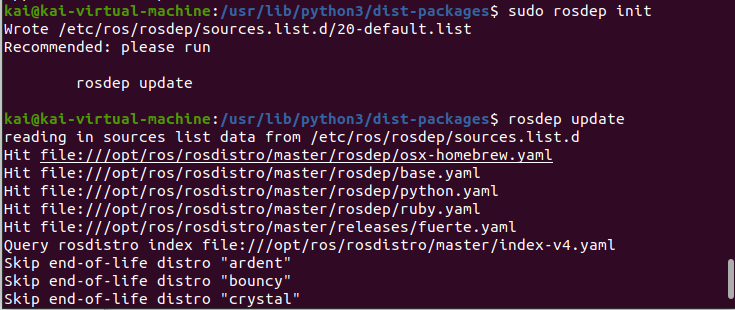
这样ros系统就安装完成了。
三、代码测试
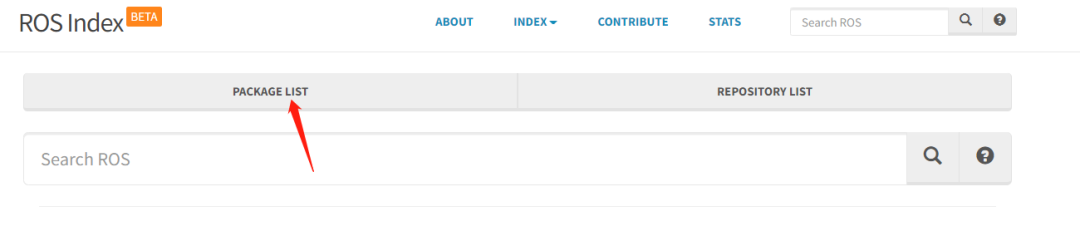
1. 打开网址https://index.ros.org/,点击PACKAGE LIST
再点击NOETIC
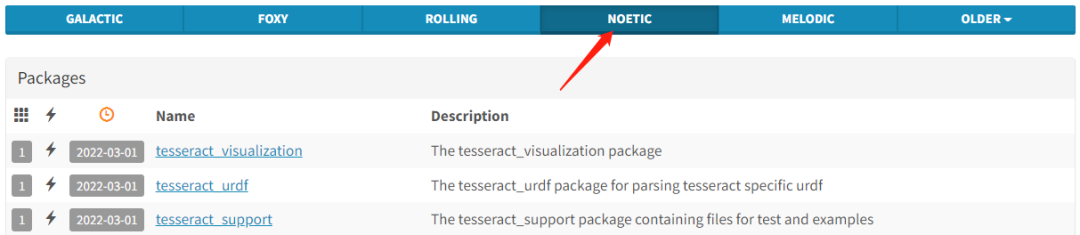
找到这个包,点击进入,这里面有这个包的详细介绍

2. 接下来我们要安装这个包
输入命令
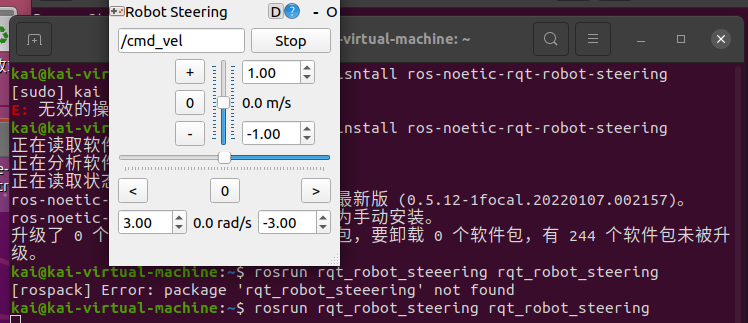
sudo apt install ros-noetic-rqt-robot-steering

我们首先启动roscore(打开另一个终端启动)
然后在原来的终端输入命令
rosrun rqt_robot_steering rqt_robot_steering
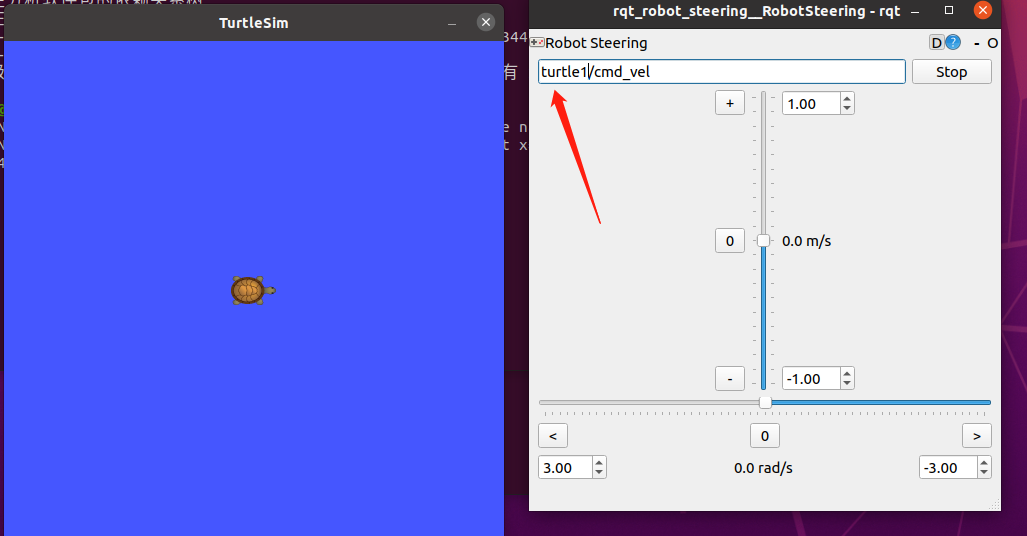
然后就会弹出一个窗口,这是用于控制机器人运动速度的
3. 接下来弄一个可以操控的对象,打开新的端口,
输入命令
sudo apt install ros-noetic-turtlesim,
如果已经安装,则不用管

再输入命令
rosrun turtlesim turtlesim_node,
会弹出一个窗口,里面有一只乌龟,那就是我们要操作的对象
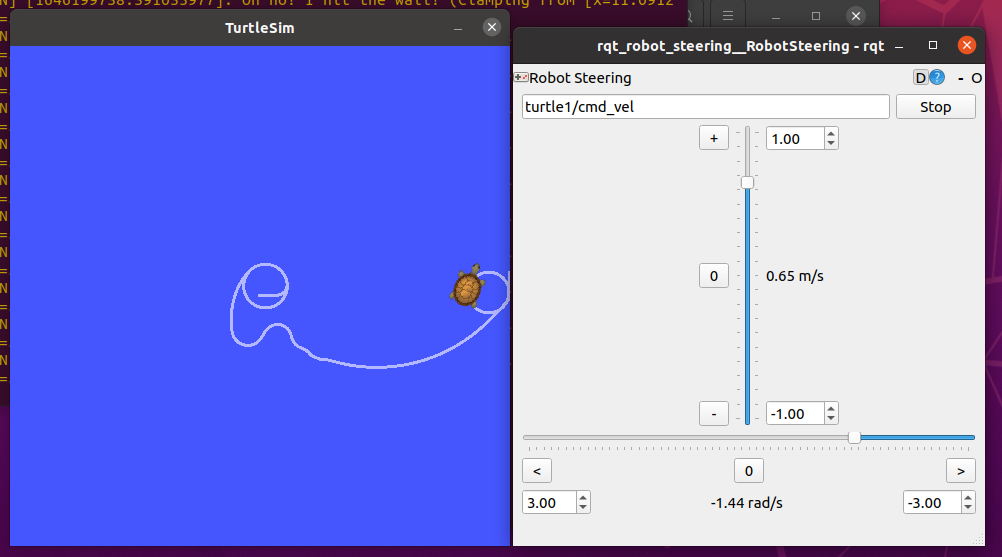
4. 打开刚刚的窗口,在主题前面输入turtle1,然后改变速度,乌龟就会动了
参考视频:https://www.bilibili.com/video/BV1zv411E7G6?p=1