




ZTE-Predictor Disk Failure Prediction System Based on LSTM.pdf
免费下载
ZTE-Predictor: Disk Failure Prediction System Based on LSTM
Hongzhang Yang
†‡
, Zongzhao Li
‡
, Huiyuan Qiang
‡
, Zhongliang Li
‡
, Yaofeng Tu
‡
, and Yahui Yang
†*
†
School of Software & Microelectronics, Peking University, China
‡
ZTE Corporation, China
*
Corrsponding Author: yhyang@ss.pku.edu.cn
Abstract—Disk failure prediction technology has become a
hotspot in both academia and industry, which is of great
significance to improve the reliability of data center. This
paper studies ZTE's disk SMART (Self-Monitoring Analysis
and Reporting Technology) data set, trying to predict whether
the disk will fail within 5-7 days. In the model training stage,
the disk
state is classified as normal and failure within 5 days
.
Then the positive and negative samples are balanced by both
over-sampling and under-sampling. Finally, the data set is
trained by LSTM (Long Short-Term Memory) and the disk
failure prediction model is obtained. In the experiment of ZTE
historical data set, the best FDR (Fault Detection Rate) is 97.4%
and FAR (False A
larm
Rate) is 0.3%. After launching in ZTE
data center for 7 months, the best FDR is 94.5%, and the FAR
is 0.7%.
Keywords—Disk; Failure; LSTM; Prediction
I. INTRODUCTION AND MOTIVATION
With the advent of the era of big data, digital data has
become precious. Most of the world's data is stored in disks.
Massive data storage makes the stability of disks face great
challenges. Once a disk is failed, the data stored in it may be
lost forever. Although the disk can be backed up redundantly,
it will increase the cost, and data loss will still occur when
multiple disks are damaged. According to Backblaze’s report
[1] in 2019, the annual failure rate of disk is 1.25%, making
maintenance extremely difficult [2]
. In a ZTE data center
with 25,000 disks, disks fail almost every day.
Disk failures are generally dived into unpredictable
failures and predictable failures. Unpredictable failures are
often caused by unexpected accidents, which will not be
discussed in this paper. For predictable failures, the
abnormal external vibration, the abnormal temperature and
humidity around the disk, and the increase of read-write error
rate provide the possibility for the disk failure prediction.
Migration of the data ahead can greatly reduce the loss. Disk
failure prediction technology has become a hotspot in both
academia and industry, which is of great significance to
improve the reliability of data center.
In the related research [3]-[12], the main method is to
establish a status classification model based on the disk
status data, and then classify the disk data to be tested
according to the classification model. One type is normal and
the other is near-failure. The main constraint of this method
is the limited applicability. This is because the operation and
maintenance personnel can only know that the
disk
is about
to fail, but how long it will fail is unknown, and it is difficult
to grasp the timing of disk replacement. Changing disks too
early causes a lot of disk life cycles to be wasted. Changing
disks too late can easily lead to permanent irreparable data.
Based on ZTE's needs for efficient disk management, we
consider that it is reasonable to predict disk failures about 5-
7days in advance.
This paper studies the SMART [13] dataset collected by
ZTE once a day, trying to predict whether the disk will fail
within 5-7 days. The disk status is classified as normal or
failure within 5 days. After that, the positive and negative
samples are balanced by over sampling and under sampling.
Finally, the characteristic data is trained and the disk failure
prediction model is obtained. In the experimental stage,
based on the ZTE historical data set, this paper compares
different data balance methods, different sample_days,
different training rounds, different algorithm effects, and
carries out targeted optimization in data center for 7 months,
and achieves good results.
II. P
REDICTOR DESIGN AND IMPLEMENTATION
Because data of different disk brands have some
attributes that are different, the research object of this paper
is a total of 73,
942 Seagate disks in ZTE's data center,
including 3,119 failure disks within 2 years.
A. Sample label
SMART dataset is a set of attributes and sets threshold
values beyond which attributes should not pass under normal
operation. SMART is widely used for disk failure prediction.
Firstly, the change of SMART attribute of the disk before
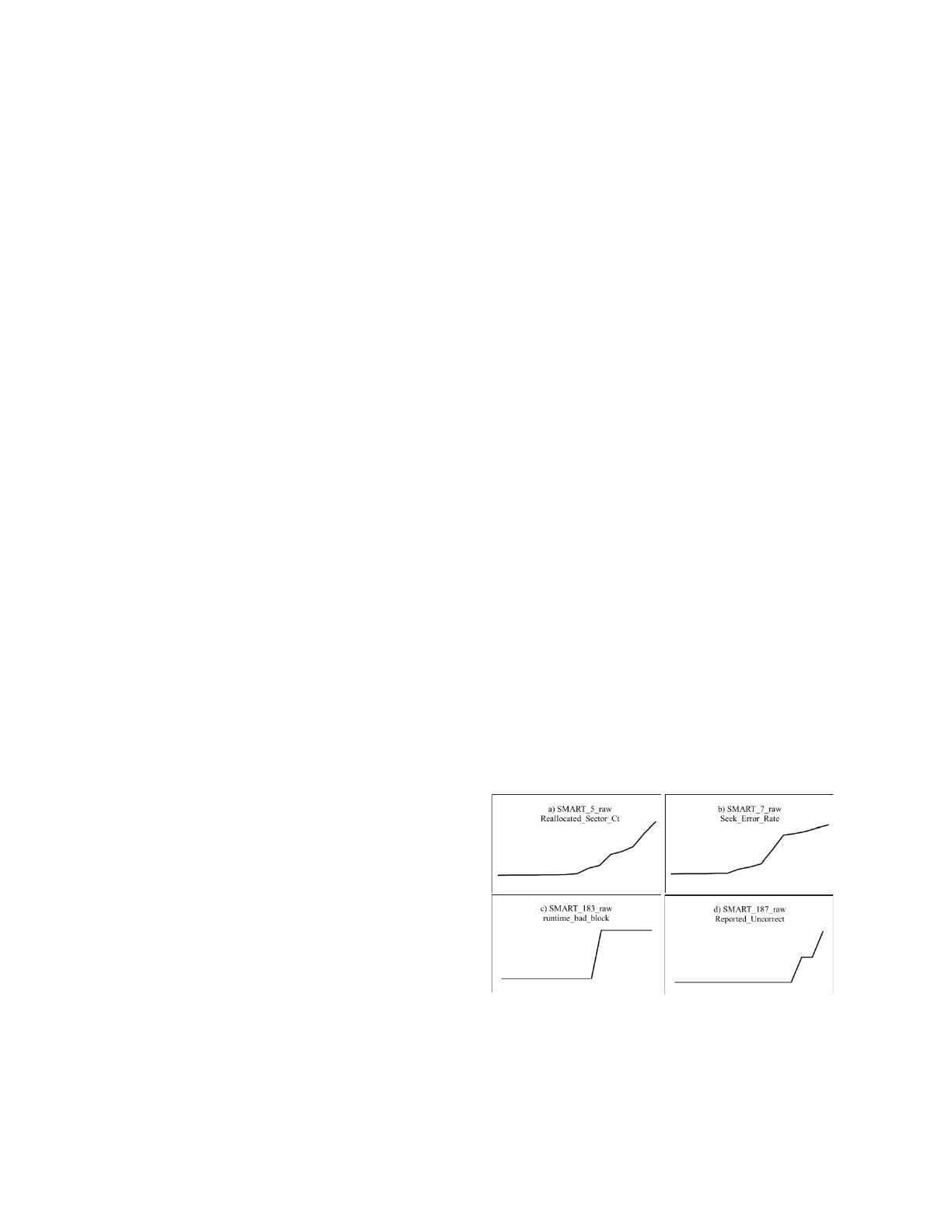
failure is observed. As is shown in
Figure 1
, the values of
SMART_5_raw, SMART_7_raw, SMART_183_raw, and
SMART_187_raw in the dataset before the failure changes
significantly, which are the most significant attributes for
prediction in this paper. Similar conclusions can be drawn
from the Backblaze dataset. We observe the status of a large
number of
disk
s and take into account the actual application
requirements, finally the disk is defined as the failed disk on
the 5th day before the failure.
Fig. 1. THE SUDDEN CHANGE OF FOUR SMART ATTRIBUTES BEFORE DISK
FAILURE
The original positive samples of the training set are
SMART attribute data of all failure disks within 5 days of the
failure
time, and the original negative samples of the training
set are SMART attribute data randomly selected 10 times
from every healthy disk. Therefore, there were 18,714
positive samples and 708,230 negative samples.
17
2020 50th Annual IEEE/IFIP International Conference on Dependable Systems and Networks - Supplemental Volume (DSN-S)
978-1-7281-7260-6/20/$31.00 ©2020 IEEE
DOI 10.1109/DSN-S50200.2020.00017
Authorized licensed use limited to: ZTE CORPORATION. Downloaded on August 29,2023 at 01:53:42 UTC from IEEE Xplore. Restrictions apply.
B. Feature engineering
Due to occasional SMART acquisition failures or errors
in transmitting data sets, missing value padding is necessary.
The method we adopted in this paper is: if the missing values
are consecutive 2 or more, then the mode of the SMART
item on the disk is used as the filling value; if there is only
one missing value
, the average of the value before and after
it is used as the filling value.
Data normalization uses the interval scaling method,
which uses Max and Min in a feature to scale all values to
the interval of [0, 1].
Sample_days and predict_failure_days are 2 important
parameters:
x Sample_days is defined as the time window size of
the input data of the LSTM network in each
sequence sample, for example,
sample_days
is 5, and
then a training sample will contain SMART attribute
information of the disk in the past 5 days. The
sample_days need to have appropriate values. If it is
too small, the potential information provided to the
LSTM is less. If it is too large, it corresponds to a
long time series. The data that is too far away from
the final failure has a small impact on the prediction
of the final failure tr
end, and may even be
misleading.
x Predict_failure_days is defined as the number of
days before the failure, which is an alarm boundary.
The value of predict_failure_days also needs to be
appropriate. Too long or too short a time interval
will affect the effectiveness of disk failure
processing. The value of predict_failure_days is
reasonable for 5-7 days.
Regarding feature selection, because deep learning
models automatically learn features and the feature
dimensions of the dataset involved 45 dimensions, of which
only 21 dimensions remain after filtering out features with
variance 0. There is no further feature selection in this paperˈ
so the selected features include: SMART_1_raw,
SMART_4_raw, SMART_5_raw, SMART_7_raw,
SMART_9_raw, SMART_12_raw, SMART_183_raw,
SMART_184_raw, SMART_187_raw, SMART_188_raw,
SMART_189_raw, SMART_190_raw, SMART_192_raw,
SMART_193_raw, SMART_194_raw, SMART_197_raw,
SMART_198_raw, SMART_199_raw, SMART_240_raw,
SMART_241_raw,and SMART_242_raw.
C. Dataset balancing
As other hard disk SMART datasets face the same
problem, the number of positive samples in ZTE datasets is
far less than the number of negative samples, which makes it
difficult for machine learning algorithm to obtain sufficient
positive sample information when training the model, so
FDR is relatively low, and it is necessary to balance the data.
This paper attempts four methods of sample balancing,
including ADASYN [14], SMOTE [15], ADASYN
combined with ENN [16], and SMOTE combined with ENN,
in order to compare the different prediction results. After
data balance, the number of positive and negative samples is
both 50,000. In the evaluation section, we will compare the
influence of data balance on the prediction effect.
D. Training model
Every disk goes through a process from health to failure,
so the SMART data collected periodically at a fixed time
period is time series. As a common algorithm, the memory of
the RNN model is generally within 7 time periods, and the
data entered early will gradually fail due to the disappearance
of the gradient. If only the SMART attribute is used to
change the time window of 7 days or less, it is far from
reflecting the change of the disk state. Fortunately, LSTM is
an improved version of RNN, which works better on
problems with time series characteristics. It stores memory
through the information conveyor, which solves the problem
of disappearance of gradient, so that this paper can use a
larger time window to disk prediction. In addition, for
comparison, this paper also tried common algorithms,
including RNN [10], AdaBoost [7], random forest [5], LOG
[5], SVM [5],
and decision tree [
5].
TABLE I. LSTM MODEL PARAMETER
Layer(type)
Output shape
lstm_1(LSTM)
(None, 30, 32)
lstm_2(LSTM)
(None, 30, 64)
lstm_3(LSTM)
(None, 128)
dense_1(Dense)
(None, 128)
dense_2(Dense)
(None, 64)
dense_3(Dense)
(None, 1)
As shown in Table 1, this paper uses the LSTM N to 1
model. The input is the data in the sample_days, and the
output is whether the failure will occur in 5 days. The output
is 1 if a failure
is about to occur, otherwise it is 0.
Considering the complexity of disk failure prediction rules,
this paper builds a neural network composed of 3 layers of
LSTM and 3 layers of Dense. The output dimensions of the
first 5 layers are 32, 64, 128, 128, 64, and the output
dimensions of the 6th layer are1.
III. E
VALUATIONS
In this chapter, firstly, training and testing are carried out
based on ZTE historical data set, and all samples are divided
into training set data and test set according to the proportion
of 8:2. During the test, different data balance methods,
different sample_days sizes, different training rounds, and
different algorithms are compared respectively. Each sample
is classified of failure or health. Then, within 7 months of
launch in ZTE data center, we predict whether there will be
any failure in the next 5-7 days based on each disk. In this
chapter, FDR and FAR are used as evaluation indexes.
A. Evaluations on historical data set
In this chapter, based on unbalancing, ADASYN,
SMOTE, ADASYN combined with ENN, and SMOTE
combined with ENN, the original dataset is preprocessed to
compare. In order to improve the efficiency, the number of
training iterations is limited to 50 rounds, and the
sample_days is set to 30. The experimental results are shown
in Table 2. Under the same factors of feature, model, and
predict_failure_days, compared with the unbalancing, the
over-
sampling method improves the FDR significantly, and
the combination of over-sampling and under-sampling
method reduces the FAR, further improving the prediction
effect. Among them, the best performance is SMOTE
combined with ENN, FDR is 89.2%, FAR is 9.3%, so this
method is used for data balance in subsequent experiments.
18
Authorized licensed use limited to: ZTE CORPORATION. Downloaded on August 29,2023 at 01:53:42 UTC from IEEE Xplore. Restrictions apply.
of 4
免费下载
【版权声明】本文为墨天轮用户原创内容,转载时必须标注文档的来源(墨天轮),文档链接,文档作者等基本信息,否则作者和墨天轮有权追究责任。如果您发现墨天轮中有涉嫌抄袭或者侵权的内容,欢迎发送邮件至:contact@modb.pro进行举报,并提供相关证据,一经查实,墨天轮将立刻删除相关内容。
下载排行榜

评论