




ICDE2024_PlatoD2GL An Efficient Dynamic Deep Graph Learning System for Graph Neural Network Training on Billion-Scale Graphs_腾讯云.pdf
免费下载
PlatoD2GL: An Efficient Dynamic Deep Graph
Learning System for Graph Neural Network
Training on Billion-Scale Graphs
Xing Huang
†
Dandan Lin
∗
Weiyi Huang
†
Shijie Sun
†
Jie Wen
†
Chuan Chen
†
WeChat, Tencent Inc.
†
Shenzhen Institute of Computing Sciences
∗
{healyhuang, viniehuang, cedricsun, welkinwen, chuanchen}@tencent.com
†
lindandan@sics.ac.cn
∗
Abstract—Recently, huge interests in both academic and in-
dustry have been posed to Graph Neural Network due to its
power on revealing the topological information inside the data.
To support the real-world applications, most of (if not all) which
contain large-scale graphs with billions of edges, a number of
graph-based deep learning systems have been proposed and
implemented. However, all of them fail to efficiently process the
dynamic graphs in terms of both memory and time cost. The
state-of-the-art suffers from two issues: (1) expensive memory
consumption due to the huge indexing overhead of numerous
key-value pairs in traditional key-value topology storage and (2)
inefficient dynamic updating due to the heavy updates on indexing
structures for weighted neighbor sampling. In this paper, we
proposed a Dynamic Graph-based Learning System PlatoD2GL
to address above two issues. Specifically, we design a novel
and effective non-key-value data structure, termed samtree,for
dynamic topology storage, which largely reduces the memory
cost. In addition, we propose an efficient sampling indexing
structure FSTable by utilizing Fenwick tree, guaranteeing the
efficiency of both dynamic updates and weighted sampling.
Comprehensive experiments have demonstrated that, for dynamic
updating the graph topology, the efficiency of our system by up
to 79.8% and by up to 6.3 times in terms of memory and time
cost, respectively. Now, our system serves the major traffic in
WeChat Platform for training various GNN models.
I. INTRODUCTION
By taking the graph data (i.e., vertices and edges) as input,
graph neural network (GNN) models update the model param-
eters by considering both topology information and attributes
on vertices or edges. Due to its power, GNN models have
been widely applied in various real-world applications in many
critical fields, including recommendation systems [31], [44],
[12], [53], spam review detection [27], fraud detection [4],
[42], [6], anomaly detection [5], biomolecule classification
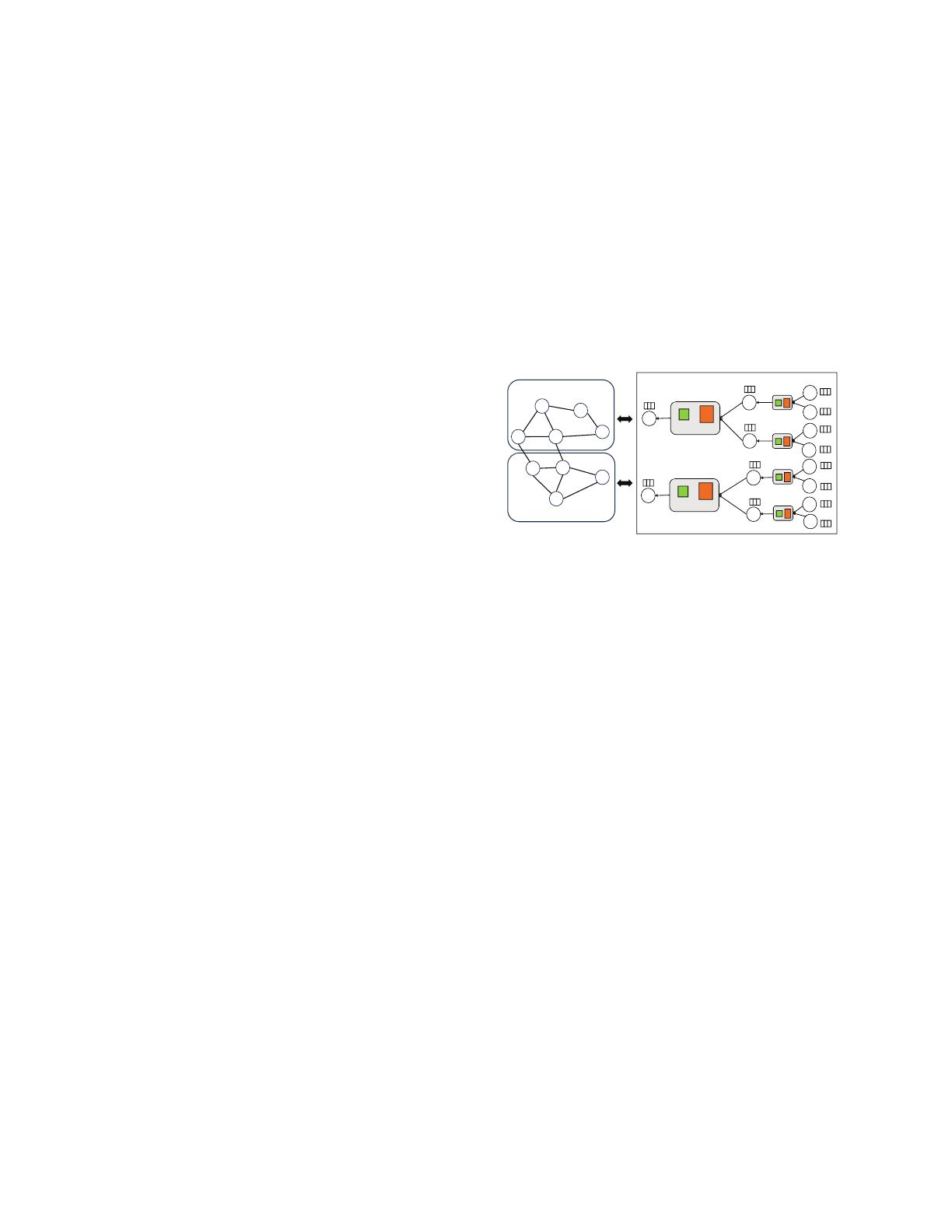
[41], natural language processing [48] and so forth. Figure 1
plots an example of the training phase of GNN models in
reality where the graph is stored in a distributed way. Specif-
ically, a GNN approach updates the embedding of a vertex
by iteratively aggregating the information from its neighbors.
For example, to update the embedding of vertex 1, it firstly
samples a proportion of it neighbors, i.e., vertex 2 and vertex
3, then aggregates the information of sampled neighbors, and
finally, combines the previous information of vertex 1 and
the neighbor information as the final embedding. Note that
sampling a proportion of neighbours is widely used in real
1
8
3
2
9
7
4
6
5
Graph Store 2
Graph Store 1
Training Phase
3
9
7
2
2
3
4
6
5
6
4
5
1
Aggr
Comb
Sample
5
Aggr
Comb
Sample
Comb: combination
Aggr: aggregation
Fig. 1: A running example of GNN training phase.
world applications since aggregating all neighbours of a vertex
is infeasible for large-scale graphs [17], [2], [18], [54], [15].
In general, to support the training of GNN models, a deep
graph learning system is important by providing the following
two abilities: (1) a distributed graph storage for storing the
large scale graphs (which is common in reality); (2) an efficient
sampling strategy for sampling K-hop neighbors of a vertex;
For example, for the live-streaming recommendation scenarios
in WeChat (the largest social media APP in China), the user-
item interaction graph could be with nearly 65.9 billion edges,
which cannot be stored in a single machines. However, due
to the explosion of GNN models in real-world applications,
supporting the GNN training on dynamic graphs is also an
indispensable requirement for a deep graph learning system.
For instance, for the online recommendation services, the
user interest is highly dynamic and non-stationary [3], [21],
[46], [31], leading to the frequently-evolving user-item graphs.
If a GNN-based recommendation model cannot capture the
instant user interest, the user might not be interested in the
recommended items inferred by the GNN model, making the
loss of user in the platform [11], [28], [29].
For training GNN on large scale graphs, a lot of dis-
tributed deep graph learning systems have been proposed,
e.g., AliGraph [54], Euler [22], Plato [23], DistDGL [52],
ByteGNN [51], and PlatoGL [31]. Most of existing deep graph
learning systems, e.g., Euler, Plato, DistDGL and ByteGNN
provide a static graph storage, i.e., directly storing the graph
in a cluster of physical machines (termed graph servers)by
using the graph partition methods (like METIS [24]). However,
these systems fail to support dynamic graphs since the graph
needs to be re-partitioned and re-deployed from scratch in
2421
2024 IEEE 40th International Conference on Data Engineering (ICDE)
2375-026X/24/$31.00 ©2024 IEEE
DOI 10.1109/ICDE60146.2024.00191
2024 IEEE 40th International Conference on Data Engineering (ICDE) | 979-8-3503-1715-2/24/$31.00 ©2024 IEEE | DOI: 10.1109/ICDE60146.2024.00191
Authorized licensed use limited to: Tencent. Downloaded on April 22,2025 at 08:50:16 UTC from IEEE Xplore. Restrictions apply.
graph servers when an edge is inserted/deleted in the graph.
Among existing systems, PlatoGL [31] is the state-of-the-
art to support a dynamic graph storage by utilizing the block-
based key-value store. That is, edges in a graph are stored
as tuples of key, value, where the key is a vertex s in the
graph with some extra information and the value is a block
that stores a proportion of neighbors of vertex s. In addition,
for the efficient weighted neighbor sampling, PlatoGL [31]
proposed a block-based sampling method by exploiting the
Inverse Transform Sampling (ITS) method [47]. However,
PlatoGL suffers from the following two limitations.
• the expensive memory consumption issue. Since a source
vertex s might have multiple blocks, each key designed by
PlatoGL consist of various information except the unique
identifier (ID) of vertex s for uniquely mapping to a specific
block. Thus, it has to maintain large number of indexings for
mapping the keys with their corresponding values (which is
the limitation of the key-value format), leading to expensive
memory overhead.
• the inefficient dynamic graph updates issue. It needs to
update c
umulative sum table (CSTable) (which is used for
fast weighted sampling) for each source vertex. To be spe-
cific, when a new neighbor of a source vertex s is inserted,
the CSTable of s should be re-computed from scratch since
each element v in CSTable requires to sum up all the weights
of vertices before v. In worst case, it takes O(n
L
) time cost
where n
L
is the number of elements (i.e., out-neighbors) in
CSTable. The case would be worse in reality since the graph
is frequently evolving in real-world applications.
Contributions. This paper tackles above questions. We intro-
duce PlatoD2GL, a distributed d
ynamic deep graph learning
system that supports both efficient dynamic graph updates,
without taking much memory cost, and fast sampling strategy.
The following shows our contributions.
(1) We propose a dynamic graph storage layer inside Pla-
toD2GL to store multiple GNN-related data. Specifically, we
design a novel and effective non-key-value topology storage,
termed samtree, which largely reduces the memory cost for
the dynamic updates by avoiding maintaining the indexings
for key-value mapping. Besides, we propose efficient inser-
tion and deletion mechanisms, and theoretically prove that
the average time cost of insertion and deletion is linear to
the number of vertices in the samtree.
(2) We propose an efficient sampling indexing structure FSTable
by utilizing Fenwick tree [10]. To our best knowledge, we
are the first to exploit Fenwick tree for dynamic graphs. In
addition, we theoretically prove that the time complexity of
updating a FSTable with n
L
elements is O(log n
L
), which
is more efficient than existing CSTable used in PlatoGL.
(3) We also design a novel weighted sampling method FTS by
incorporating our FSTable with traditional ITS method.
(4) We propose two novel optimization techniques inside our
PlatoD2GL system: (1) a compression technique by com-
pressing our samtree for further reducing the memory cost
and (2) a batch-based latch-free concurrent mechanism by
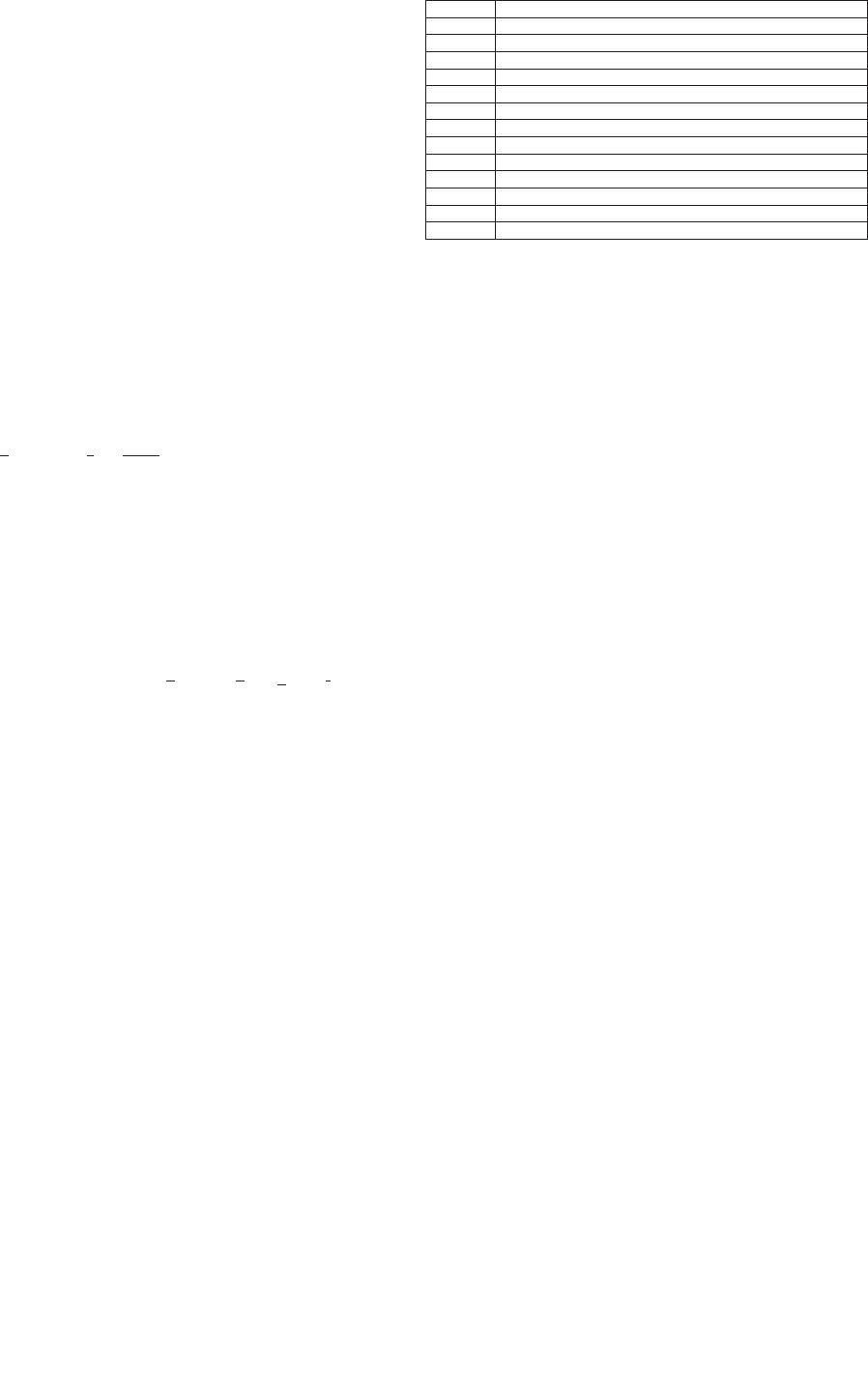
Symbol Description
G(V, E) The directed graph G with vertices set V , edges set E
w
u,v
The weight of an edge e(u, v)
w
u
The sum of weights of all edges that linked from u
N
s
The set of out-neighbours of vertex s
n
s
The number of out-neighbours of vertex s
T
s
The samtree of vertex s for storing its out-neighbors
c, H The node capacity and height of a smatree T , respectively
r
i
The node in the i-th level of a smatree T
α The slackness for α-Split algorithm
n
L
The number of vertices in a leaf node of a samtree
C The cumulative sum table (CSTable) for ITS method
F The FSTable for FTS method
S
L
The sum of weights in a leaf node
TABLE I: Frequently-used notations.
avoiding the race conditions for accelerating the dynamic
updating process.
(5) We experimentally verified that by conducting comprehen-
sive experiments on two public datasets and one production
dataset with up to 65.9 billion edges. Comprehensive ex-
periments demonstrate that PlatoD2GL takes less memory
cost than state-of-the-art by up to 79.8% on billion-scale
graphs. Besides, PlatoD2GL is faster than state-of-the-art by
up to 6.3 times and up to 13.7 times in terms of dynamic
updates and sampling, respectively.
II. P
RELIMINARIES
In this section, we firstly introduce background of the
problem studied in this paper, and then present a widely-used
weighted sampling method Inverse Transform Sampling (ITS),
which is the building stone in our proposed system. Table I
lists the notations used in this paper.
A. Background
We start with a simple directed weighted graph G(V, E,
W) where V and E represents the set of vertices and edges,
respectively, and W: E→R
+
is a function that assigns a
weight w
u,v
to an edge e(u, v) linking from vertex u to vertex
v. For simplicity, we denote a weighted edge as e(u, v, w
u,v
).
Let N
u
denote the set of out-neighbours of vertex u. In the
following, we use “out-neighbor” and “neighbor” interchange-
ably if it is clear in the context. In this paper, we consider the
heterogeneous graph with multiple types of vertices and/or
edges, which is common in real-world applications. Besides,
in this paper, we focus on the dynamic graphs. Given a time
interval t,adynamic graph can be considered as a series of
graphs {G
(t)
|t ∈ [1,T]} where G
(t)
is a heterogeneous graph
at timestamp t and T is the largest timestamp.
Basic operations in GNN models. GNN approaches
could be basically formulated as message passing [52],
[13], [45], [17], [43], [38], [39], where vertices in the
graph propagate their messages to their neighbours and
updates their representations (i.e., in form of embedding)
by aggregating the received messages from their neighbours.
Given a heterogeneous graph G, the embedding e
(0)
u
of each
vertex u is initially assigned as its features vector f
u
. To get
2422
Authorized licensed use limited to: Tencent. Downloaded on April 22,2025 at 08:50:16 UTC from IEEE Xplore. Restrictions apply.
of 14
免费下载
【版权声明】本文为墨天轮用户原创内容,转载时必须标注文档的来源(墨天轮),文档链接,文档作者等基本信息,否则作者和墨天轮有权追究责任。如果您发现墨天轮中有涉嫌抄袭或者侵权的内容,欢迎发送邮件至:contact@modb.pro进行举报,并提供相关证据,一经查实,墨天轮将立刻删除相关内容。
下载排行榜

评论