




LIFF:在尺度和深度上的光场特征.pdf
50墨值下载
LiFF: Light Field Features in Scale and Depth
Donald G. Dansereau
1,2
, Bernd Girod
1
, and Gordon Wetzstein
1
1
Stanford University,
2
The University of Sydney
Abstract—Feature detectors and descriptors are key low-level
vision tools that many higher-level tasks build on. Unfortunately
these fail in the presence of challenging light transport effects
including partial occlusion, low contrast, and reflective or re-
fractive surfaces. Building on spatio-angular imaging modalities
offered by emerging light field cameras, we introduce a new
and computationally efficient 4D light field feature detector and
descriptor: LiFF. LiFF is scale invariant and utilizes the full
4D light field to detect features that are robust to changes in
perspective. This is particularly useful for structure from motion
(SfM) and other tasks that match features across viewpoints of a
scene. We demonstrate significantly improved 3D reconstructions
via SfM when using LiFF instead of the leading 2D or 4D features,
and show that LiFF runs an order of magnitude faster than the
leading 4D approach. Finally, LiFF inherently estimates depth
for each feature, opening a path for future research in light
field-based SfM.
I. INTRODUCTION
Feature detection and matching are the basis for a broad
range of tasks in computer vision. Image registration, pose
estimation, 3D reconstruction, place recognition, combinations
of these, e.g. structure from motion (SfM) and simultaneous
localisation and mapping (SLAM), along with a vast body of
related tasks, rely directly on being able to identify and match
features across images. While these approaches work relatively
robustly over a range of applications, some remain out of
reach due to poor performance in challenging conditions. Even
infrequent failures can be unacceptable, as in the case of
autonomous driving.
State-of-the-art features fail in challenging conditions
including self-similar, occlusion-rich, and non-Lambertian
scenes, as well as in low-contrast scenarios including low
light and scattering media. For example, the high rate of
self-similarity and occlusion in the scene in Fig. 1 cause the
COLMAP [35] SfM solution to fail. There is also an inherent
tradeoff between computational burden and robustness: given
sufficient computation it may be possible to make sense of an
outlier-rich set of features, but it is more desirable to begin
with higher-quality features, reducing computational burden,
probability of failure, power consumption, and latency.
Light field (LF) imaging is an established tool in computer
vision offering advantages in computational complexity and
robustness to challenging scenarios [7], [10], [29], [38], [48].
This is due both to a more favourable signal-to-noise ratio
(SNR) / depth of field tradeoff than for conventional cameras,
and to the rich depth, occlusion, and native non-Lambertian
surface capture inherently supported by LFs.
In this work we propose to detect and describe blobs directly
from 4D LFs to deliver more informative features compared
with the leading 2D and 4D alternatives. Just as the scale
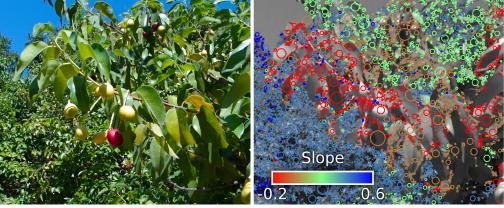
Fig. 1. (left) One of five views of a scene that COLMAP’s structure-from-
motion (SfM) solution fails to reconstruct using SIFT, but successfully
reconstructs using LiFF; (right) LiFF features have well-defined scale
and depth, measured as light field slope, revealing the 3D structure of
the scene – note we do not employ depth in the SfM solution. Code
and dataset are at http://dgd.vision/Tools/LiFF, see the supplementary
information for dataset details.
invariant feature transform (SIFT) detects blobs with well-
defined scale, the proposed light field feature (LiFF) identifies
blobs with both well-defined scale and well-defined depth
in the scene. Structures that change their appearance with
viewpoint, for example those refracted through or reflected
off curved surfaces, and those formed by occluding edges,
will not satisfy these criteria. At the same time, well-defined
features that are partially occluded are not normally detected
by 2D methods, but can be detected by LiFF via focusing
around partial occluders.
Ultimately LiFF features result in fewer mis-registrations,
more robust behaviour, and more complete 3D models than the
leading 2D and 4D methods, allowing operation over a broader
range of conditions. Following recent work comparing hand-
crafted and learned features [36], we evaluate LiFF in terms
of both low-level detections and the higher-level task of 3D
point cloud reconstruction via SfM.
LiFF features have applicability where challenging condi-
tions arise, including autonomous driving, delivery drones,
surveillance, and infrastructure monitoring, in which weather
and low light commonly complicate vision. It also opens a
range of applications in which feature-based methods are not
presently employed due to their poor rate of success, including
medical imagery, industrial sites with poor visibility such as
mines, and in underwater systems.
The key contributions of this work are:
• We describe LiFF, a novel feature detector and descriptor
that is less computationally expensive than leading 4D
methods and natively delivers depth information;
• We demonstrate that LiFF yields superior detection rates
compared with competing 2D and 4D methods in low-
SNR scenarios; and
arXiv:1901.03916v1 [cs.CV] 13 Jan 2019
加入“知识星球 行业与管理资源”库,免费下载报告合集
1.
每月上传分享2000+份最新行业资源(涵盖科技、金融、教育、互联网、
房地产、生物制药、医疗健康等行研报告、科技动态、管理方案等);
2. 免费下载资源库已存行业报告。
3. 免费下载资源库已存国内外咨询公司管理方案与企业运营制度等。
4. 免费下载资源库已存科技方案、论文、报告及课件。
微信扫码二维码,免费报告轻松领
微信扫码加入“知识星球 行业与管理资源”,
获取更多行业报告、管理文案、大师笔记
加入微信群,每日获取免费3+份报告
1.
扫一扫二维码,添加客服微信(微信号:Teamkon2)
2.
添加好友请备注:姓名+单位+业务领域
3. 群主将邀请您进专业行业报告资源群
of 10
50墨值下载
【版权声明】本文为墨天轮用户原创内容,转载时必须标注文档的来源(墨天轮),文档链接,文档作者等基本信息,否则作者和墨天轮有权追究责任。如果您发现墨天轮中有涉嫌抄袭或者侵权的内容,欢迎发送邮件至:contact@modb.pro进行举报,并提供相关证据,一经查实,墨天轮将立刻删除相关内容。
下载排行榜

评论