




在RT-Thread上实现slcan协议让开发板变can调试器-陈斌.pdf
免费下载

在RT-Thread上实现slcan协议
让开发板变can调试器
分享人:陈斌 2022-05
CAN (Controller Area Network)控制器局域网是一种车用的总线标准。CAN 2.0 A/B标
准于1991年发布。CAN FD 1.0标准于 2012年发布。我们开发中会经常看到芯片的数据手册
上的通信接口上写着“2 个 CAN 2.0A/B 总线接口”这个代表什么意思呢
CAN2.0 A部分支持11位标识符的数据帧和远程帧,最大传输速率1Mbits,mtu 为8字节。
CAN2.0 B部分支持29位标识符的扩展数据帧-远程帧,最大传输速率1Mbits,mtu 也为8字
节。
CAN FD 1.0标准是为了解决总线设备越来越多,总线负载率越来越高的问题而升级的可变数据和
速率的总线标准,最大传输速率 5Mbits,mtu可以达到64字节。
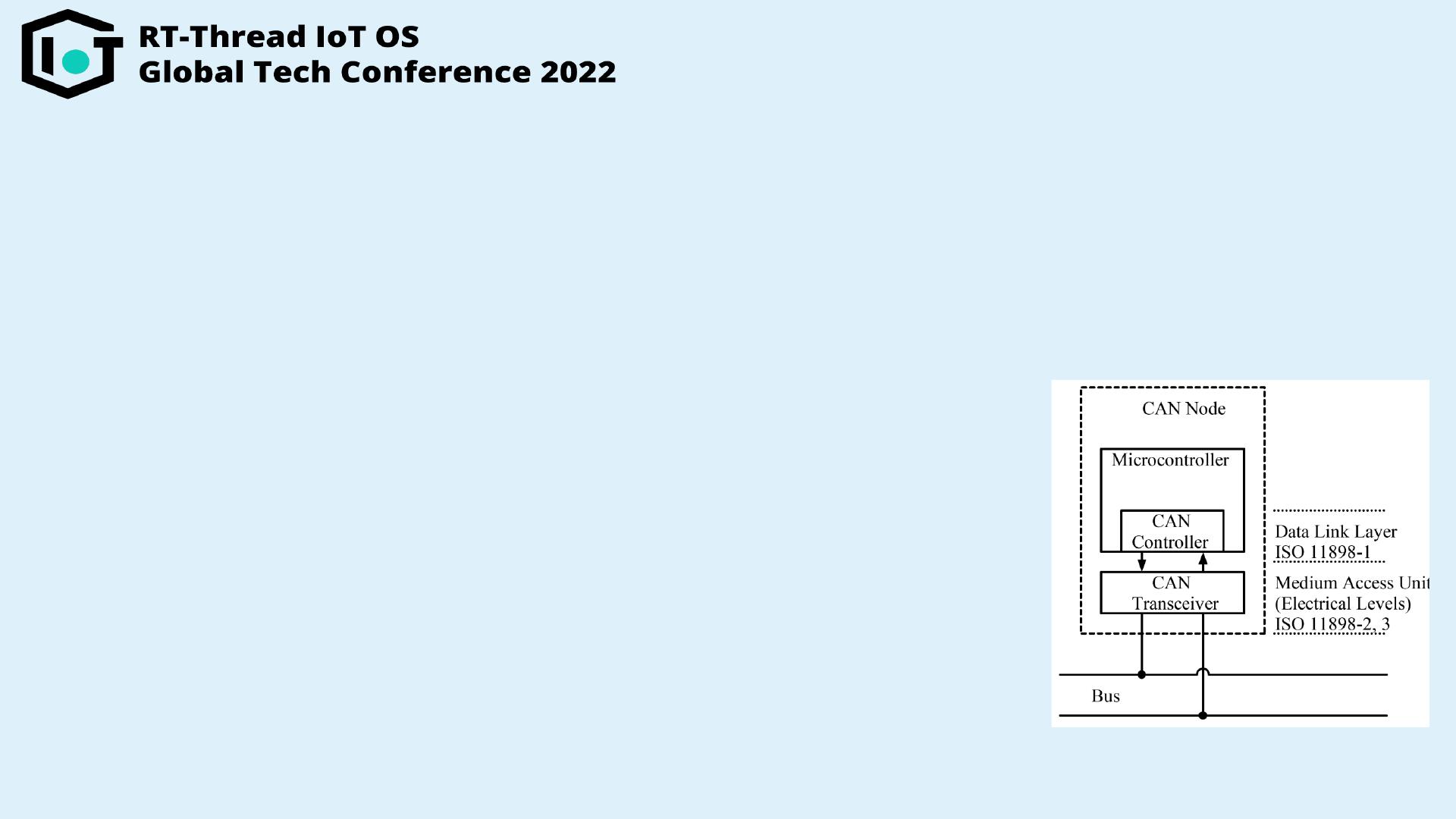
CAN硬件上是使用差分信号,采用非破坏性仲裁机制和丰富的错误监测恢复机制,支持多主机模
式,高可靠性和高实时性。CAN的控制器和收发器配合的很巧妙,仅仅只有两根线可以实现收发
冲突退避,TXD发送数据,RXD会不断接收数据。在CAN发送数据时,先会发送仲裁域(ID标
识符和远程发送请求位),如果发出去的信号是“隐性”电平逻辑1时,而接收脚却接收的是
“显性”电平逻辑0时,CAN控制器会认为有个CAN ID标识符比自己当前标识符高的设备在发
送数据,会主动进入接收状态。所以两个CAN设备在发送不同ID标识符的数据时,ID越小优先
级越高,在仲裁时成功发送的机会更大。
同样远程帧的远程发送请求位是隐性电平,数据帧是显性电平,两个CAN设备发送同一标识符时
数据帧优先远程帧的。
USB和CAN
of 16
免费下载
【版权声明】本文为墨天轮用户原创内容,转载时必须标注文档的来源(墨天轮),文档链接,文档作者等基本信息,否则作者和墨天轮有权追究责任。如果您发现墨天轮中有涉嫌抄袭或者侵权的内容,欢迎发送邮件至:contact@modb.pro进行举报,并提供相关证据,一经查实,墨天轮将立刻删除相关内容。

文档被以下合辑收录
相关文档
评论