




raft论文.pdf
免费下载

In Search of an Understandable Consensus Algorithm
(Extended Version)
Diego Ongaro and John Oust erhou t
Stanford University
Abstract
Raft is a consen sus algorithm for managing a replicated
log. It produces a result equivalent to (multi-)Paxos, and
it is as efficient as Paxos, but its structur e is different
from Paxos; this makes Raft more understandab le than
Paxos and also provides a better foundation for build-
ing practical system s. In order to enhance understandabil-
ity, Raft separates the key elements of consensus, such as
leader election, log replication, and safety, and it enforce s
a stronger degree of coherency to reduce the number of
states that must be considered. Results from a user study
demonstra te that Raft is easier for students to learn than
Paxos. Raft also includes a new m e chanism for changing
the cluster membership, which uses overlapping majori-
ties to gua rantee safety.
1 Introduction
Consensus algorithm s allow a collection of machin es
to work as a coheren t group that ca n survive the fail-
ures o f some of its members. Because of this, they play a
key role in building reliable large-scale software systems.
Paxos [15, 16] has dominated the discussion of consen-
sus algorithms over the last decade: most implementations
of consensus are based on Paxos or influenced by it, and
Paxos has become the primary vehicle used to teach stu-
dents about c onsensus.
Unfortu nately, Paxos is quite difficult to understand, in
spite of numerous attempts to make it more approachable.
Furthermore, its architecture requires complex chan ges
to support practical systems. As a result, both system
builders and students struggle with Paxos.
After struggling with Paxos ourselves, we set out to
find a new consensus algorithm that could provide a bet-
ter foundatio n for system building and education. Our ap-
proach was unusua l in that our primary goal was under-
standability: could we define a consensus algorithm for
practical systems and describe it in a way that is signifi-
cantly easier to learn than Paxos? Furtherm ore, we wanted
the algorithm to facilitate the development of intuitions
that are essential for system builders. It was important not
just for the algorithm to work, but for it to be obvious why
it works.
The result of this work is a consensus algorithm called
Raft. In designing Raft we applied specific techniques to
improve understand ability, including de composition (Raft
separates leader election, log rep lica tion, and safety) and
This tech report is an extended version of [32]; additional material is
noted with a gray bar in the margin. Published May 20, 2014.
state space reduction (relative to Paxos, Raft reduces the
degree of nondeterminism and th e ways servers can be in-
consistent with each othe r). A user study with 43 students
at two universities shows that Raft is significan tly easier
to understan d than Paxos: after learning both algorithms,
33 of these students were able to answer questions about
Raft better than questions about Paxos.
Raft is similar in m any ways to existing consensus al-
gorithms (most notably, Oki and Liskov’s Viewstamped
Replication [29, 22]), but it has several novel fea tures:
• Strong leader: Raft u ses a stronger form of leader-
ship than other consensus algorithms. For example,
log entries only flow fr om the leader to other servers.
This simplifies the management of the replicated log
and makes Raft easier to understand.
• Leader election: Raft uses randomized timers to
elect leaders. This adds only a small amount of
mechanism to the heartbeats already required for any
consensus algorithm, while resolving conflicts sim-
ply and rapidly.
• Membership changes: Raft’s mechanism for
changin g the set of servers in the cluster uses a new
joint consensus approach where the majorities of
two different configurations overlap during transi-
tions. This allows the cluster to continue opera ting
normally du ring configuration changes.
We believe that Raft is superior to Paxos and othe r con-
sensus algorithms, both for educatio nal purposes and as a
foundation for implementation. It is simpler and more un-
derstandable than other algorithms; it is described com-
pletely enough to m eet the needs of a practical system;
it has several open-source implementations and is used
by several companies; its saf ety properties have bee n for-
mally specified and proven; and its efficiency is compara-
ble to other algorithms.
The remainder of the paper intr oduces the replicated
state machine p roblem (Section 2), discusses the strength s
and weaknesses of Paxos (Section 3), describes our gen-
eral approach to u nderstandability (Section 4), presents
the Raft co nsensus algorithm (Sections 5–8), evaluates
Raft (Section 9), and discusses related work (Section 10).
2 Replicated state machines
Consensus algorithms typically arise in the context of
replicated state machines [ 37]. In this approach, state m a-
chines on a collection of servers compute identical copies
of the same state an d can continue operating even if some
of the servers are down. Replicated state machines are
1
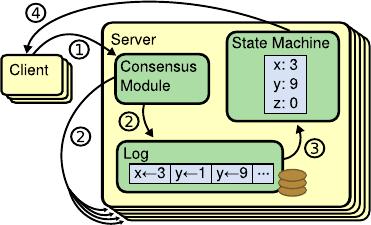
Figure 1: Replicated state machine architecture. The con-
sensus al gorithm manages a replicated log containing state
machine commands f rom clients. The state machines process
identical sequences of commands from the logs, so they pro-
duce the same outputs.
used to solve a variety of fault tolerance problems in dis-
tributed systems. For example, large-scale systems that
have a single cluster leader, such as GFS [8], HDFS [38],
and RAMCloud [33], typically use a separate replicated
state machine to manage leader election and stor e config-
uration information that must survive leader crashes. Ex-
amples of replicated state machines include Chubby [2]
and ZooKeeper [11].
Replicated state machines are typically implemented
using a replicated log, as shown in Figure 1. Each server
stores a log containing a series of comma nds, which its
state ma chine executes in order. Each log contains the
same comma nds in the same order, so each state ma-
chine processes the same seq uence of commands. Since
the state machines are determin istic, each computes the
same state and the same sequen c e of outputs.
Keeping the replicated log consistent is the job of the
consensus algorithm. The consensus modu le on a server
receives commands from clients and adds them to its log.
It communicate s with the consensus m odules on other
servers to ensure that every log eventually contains the
same requests in the same order, even if some servers fail.
Once c ommands are properly re plicated, each server’s
state m a chine processes them in log order, and the out-
puts are returned to clients. As a result, the servers appear
to form a single, high ly reliable state machine.
Consensus algorithms for practica l systems typically
have the f ollowing properties:
• They ensure safety (never returning an incorrect re-
sult) under all non-Byzantine conditions, including
network delays, partitions, and packet loss, duplica-
tion, and reo rdering.
• They are fully functional (available) as long as any
majority o f the servers are operational and can com-
municate with each other and with clients. Thus, a
typical cluster of five servers can tolerate the failure
of any two servers. Servers are assumed to fail by
stopping; they may later recover from state on stable
storage and rejoin the cluster.
• They do not depend on timing to ensure the consis-
tency of the logs: faulty clocks and extreme message
delays can, at worst, cause availability problems.
• In the co mmon case, a command can complete as
soon as a majority of the cluster has r e sponded to a
single round of remote procedure c alls; a minority of
slow servers need not impact overall system perfor-
mance.
3 What’s wrong with Paxos?
Over the last ten years, Leslie Lamport’s Paxos proto-
col [15] has become almost synonymous with consensus:
it is the protocol most commonly taught in courses, and
most imp le mentations o f consensus use it as a starting
point. Paxos first defines a protocol c apable of reaching
agreement on a single decision, such as a single replicated
log entry. We refer to this subset as single-decree Paxos.
Paxos then combines multiple instances of this protocol to
facilitate a series of decisions such as a log (m ulti-Paxos).
Paxos ensure s both safety and liveness, and it supports
changes in c luster membership. Its correctness has been
proven, and it is efficient in the normal case.
Unfortu nately, Paxos has two significant drawbacks.
The first drawback is that Paxos is exceptionally diffi-
cult to understand. The full explanation [15] is noto ri-
ously opaqu e; few pe ople succeed in und e rstanding it, and
only with great effort. As a result, there have been several
attempts to explain Paxos in simpler terms [16, 20, 21].
These explanations focus on the single-decree subset, yet
they are still ch allenging. In an informal survey of atten-
dees at NSDI 2012, we found few people who were com-
fortable with Paxos, even amon g seasoned researchers.
We struggled with Paxos ourselves; we were not able to
understand the complete protocol until after reading sev-
eral simplified explanations and designing our own a lter-
native protocol, a process that took almost a year.
We hypothesize that Paxos’ opaqueness derives from
its choice of the single-decr ee subset as its foundation.
Single-decree Paxos is dense and subtle: it is divided into
two stages that do n ot have simple intuitive explanations
and cannot be understood independently. Because of this,
it is difficult to develop intuitions about why the single-
decree protocol works. The composition rules for multi-
Paxos add significant additional complexity and subtlety.
We believe that the overall problem of reaching consensus
on multip le decisions (i.e., a log in stead of a single entry)
can be decomposed in other ways that are more direct and
obvious.
The second problem with Paxos is that it does not pro-
vide a good foundation for building practical implemen-
tations. One re ason is that there is no widely agreed-
upon algorithm for multi-Paxos. Lamport’s descriptions
are mostly about single-decree Paxos; he sketched possi-
ble approaches to multi-Paxos, but many details are miss-
ing. There have been several attempts to flesh out and op-
timize Paxos, such as [26], [39], and [13], but these differ
2
from each other and from Lamport’s sketches. Systems
such as Chubby [4] have impleme nted Paxos-like algo-
rithms, but in most cases their deta ils have not been pub-
lished.
Furthermore, the Paxos architecture is a poor one for
building pra ctical systems; this is another consequence of
the single-decree decomposition. For example, there is lit-
tle benefit to choosing a collection of log entries indepe n-
dently and then melding them into a sequential log; this
just adds complexity. I t is simp le r and more efficient to
design a system around a log, where new entrie s are ap-
pended sequentially in a constrained order. Another pr ob-
lem is that Paxos uses a symmetric peer-to-peer approach
at its core (though it eventually suggests a w e ak form of
leadership as a performance optimization). This makes
sense in a simplified world where only one decision will
be made, but few practical systems use this approach. If a
series of decisions must be made, it is simpler and faster
to first elect a leader, then have the leader coordinate the
decisions.
As a result, practical systems bear little resemblance
to Paxos. Each implementation begins with Paxos, dis-
covers the difficulties in implementing it, and then de-
velops a significantly different architecture. This is time-
consumin g and error-prone, and the difficulties of under-
standing Paxos exacerbate the problem . Paxos’ formula-
tion may be a good one for proving theorems about its cor-
rectness, but real implementations are so different from
Paxos that the proof s have little value. The following com-
ment fro m the Chubby implem e nters is typical:
There are significant gaps between the description of
the Paxos algorithm and the needs of a real-world
system. . . . the final system will be based on an un-
proven protocol [4].
Because of these problems, we concluded that Paxos
does not provide a good foundation either for system
building or for education . Given the importance of co n-
sensus in large-scale software systems, we decided to see
if we could design an alternative consensus algorithm
with better properties than Paxos. Raft is the result of tha t
experiment.
4 Designing for understandability
We had several goals in designing Raft: it must provide
a complete and practical foundation for system building,
so that it significantly reduces the amo unt of design work
required of developers; it must b e safe under all conditions
and available under typical operating condition s; and it
must be efficient fo r common operations. But our most
important goal—and most difficult challenge—was un-
derstandability. It must be possible for a large aud ie nce to
understand the algorithm co mfortably. In addition, it must
be possible to develop intuitions about the algorithm, so
that system builders can make the extensions that are in-
evitable in real-world implementations.
There were numero us points in the design of Raft
where we had to choose amon g alternative approaches.
In these situations we evaluated the alternatives based on
understandability: how hard is it to explain each altern a -
tive (for example, how complex is its state space, and doe s
it have subtle implicatio ns?), and how easy will it be for a
reader to co mpletely understand the approach and its im-
plications?
We recogn ize that there is a high degree of subjectiv-
ity in such a nalysis; no netheless, we used two techniques
that are generally applicable. The first technique is the
well-known approach o f proble m decomposition: wher-
ever possible, we divided problems into separate pieces
that could be solved, exp lained, and understood relatively
indepen dently. For example, in Raft we separated leader
election, log replication, safety, and membership changes.
Our second appr oach was to simplify the state space
by reducing the number of states to consider, ma king the
system more coherent and elim inating nondeterminism
where possible. Specifically, logs are not allowed to have
holes, and Raft limits the ways in which logs can become
inconsistent with each othe r. Although in most cases we
tried to elimina te nondeterminism, there are some situ-
ations where nondeter minism actually improves under-
standability. In particular, randomized a pproaches intro-
duce nondeterm inism, but they tend to reduce the state
space by hand ling all possible choices in a similar fashion
(“choo se any; it doesn’t matter”). We used randomization
to simplify the Raft leader election algorithm.
5 The Raft consensus algorithm
Raft is an algorithm for managing a replicated log of
the form described in Section 2. Figure 2 summarizes the
algorithm in condensed form for reference, and Figure 3
lists key properties of the algo rithm; the elements of these
figures are discussed pie cewise over the rest of this sec-
tion.
Raft implements co nsensus by first electing a distin-
guished leader, then giving the leader complete responsi-
bility for ma naging the replicated log. The leader accepts
log entries from clients, replicates them on other servers,
and tells servers when it is safe to apply log entries to
their state machines. H aving a leader simplifies the man-
agement of the replicated log. For example, the leader can
decide where to place new entries in the log without con-
sulting other servers, and data flows in a simple fashion
from the leader to other servers. A leader can fail or be-
come disconnected from the other servers, in which case
a new leader is elected.
Given the leader approach, Raft decomposes the con-
sensus problem into thre e relatively independent subprob-
lems, which are discussed in the subsections that follow:
• Leader election: a new leader must be chosen when
an existing leader fails (Section 5.2).
• Log replication: the leader must accept log entries
3
of 18
免费下载
【版权声明】本文为墨天轮用户原创内容,转载时必须标注文档的来源(墨天轮),文档链接,文档作者等基本信息,否则作者和墨天轮有权追究责任。如果您发现墨天轮中有涉嫌抄袭或者侵权的内容,欢迎发送邮件至:contact@modb.pro进行举报,并提供相关证据,一经查实,墨天轮将立刻删除相关内容。

文档被以下合辑收录
相关文档
评论