




VOLUMETRIC CSG GRAPH AND ITS VOXELIZATION - Sema Koç1.pdf
免费下载
VOLUMETRIC CSG GRAPH AND ITS VOXELIZATION
Sema Koç
1
, Ulus Çevik
2
e-mail: skoc@gantep.edu.tr
Department of Electrical and Electronic Engineering, University of Gaziantep, 27310 Gaziantep, Turkey
Keywords: volume scene tree, blist, voxelization, slice-sweep
ABSTRACT
This paper introduces a new representation for the
volumetric CSG scene graph. The Boolean list
representation is used for the volume scene tree, which is
differing from the traditional tree representation in the way
that any volume tree expression can be evaluated without
using recursion or stack. The scene evaluation is carried out
by a slice-sweep voxelization algorithm.
I. INTRODUCTION
A volume scene can be constructed from various type of
geometric or volumetric object such as curve, surface, solids
and CT data set. A popular technique in scene composition
is scene graph. It organizes geometric object and rendering
parameters in tree-like hierarchical structure [1].
Evaluation of scene graph is carried out by voxelization
algorithm. In recent years, a number of curve and surface
voxelization algorithms have been proposed [2-6]. Solid
voxelization on the other hand has not been sufficiently
studied. Solid objects are normally represented by their
boundary surfaces. Since the interior of solid object is not
explicitly represented, solid voxelization is difficult and
requires inside test for each voxel involved [7].
In [8], the evaluation of volume scene graph is done in a
brute-force manner, i.e. for each point in volume space,
recursively computing the value of scene graph starting
from the root. This is very expensive procedure, and can
only be used as preprocessing step, which is not practical
for interactive applications [1].
In [7], a hardware voxelization algorithm was described.
Although that algorithm is fast for small scale interactive
applications, its performance have been limited by the need
of generating intermediate object for each Boolean
operation node and hardware restriction in blending
function combination. This voxelization algorithm was
improved by using point classification map for Boolean
operations based on a frame buffer color encoding scheme
[9]. But this algorithm only provides a binary volume,
which may not provide the complete information in
volumetric space.
In [1], another volume pipeline is used which each slice is
applied to the entire CSG tree, rather than performing
volume level voxelization for each CSG node named “slice
sweeping”. Here, the basic idea is to generate a slice for
each object in the scene first, and than apply the blending
and filtering functions on the slice in postfix order of the
volume scene tree. This algorithm needs a slice data
structure to store intermediate result. 2D texture was used to
represent slices in the slice stack. From the view of time
spent, since the slice stack operation by 2D texture mapping
will occupy a large proportion in practice, more slice stack
operation leads to slower volume voxelization process.
Thus, in order to reach higher speed interior operation nodes
must be reduced as much as possible during the design of
volume scene tree.
We propose in this paper a new representation of volume
scene tree, which is named blist [10]. In Blist formulation,
Boolean expression is represented as a list of primitive
instead of tree, and may be evaluated in pipeline fashion,
combining at each step the result of classifying the cells
against the current primitive with the result of the previous
classification. The fundamental breakthrough provided here
lies in the fact that the result of the previous classifications
does not require the list of values of cell-primitive
classification results, nor a stack of intermediate result of
evaluating sub-expressions. Instead, Blist passes from one
primitive to the next a simple label, which may be stored
using at most log(H+1) bits, where H is the height of the
CSG tree [10].
Using Blist representation volume scene tree expression can
be evaluated without using recursion or stack.
The scene evaluation is carried out by a slice-sweep
voxeliza tion algorithm.
A
B
C
E
’
D
’
OUT
IN
1
1
2
II. BLIST REPRESENTATIO N OF VOLUME SCENE
TREE
In Blist formulation of volume scene tree each primitive
represent input dataset or geometric model. The basic idea
of our algorithm is generate a slice for each primitive in the
list first, then evaluate blist by updating a label, when its
value matches the primitive’s name. At the end if the label
on the voxel is 1(IN name) the voxel inside the volume
scene otherwise, it is out. So, Boolean expression of volume
scene tree is evaluated directly, combining steps used with
traditional recursive evaluation is not necessary. The details
of Blist formulation is as follows:
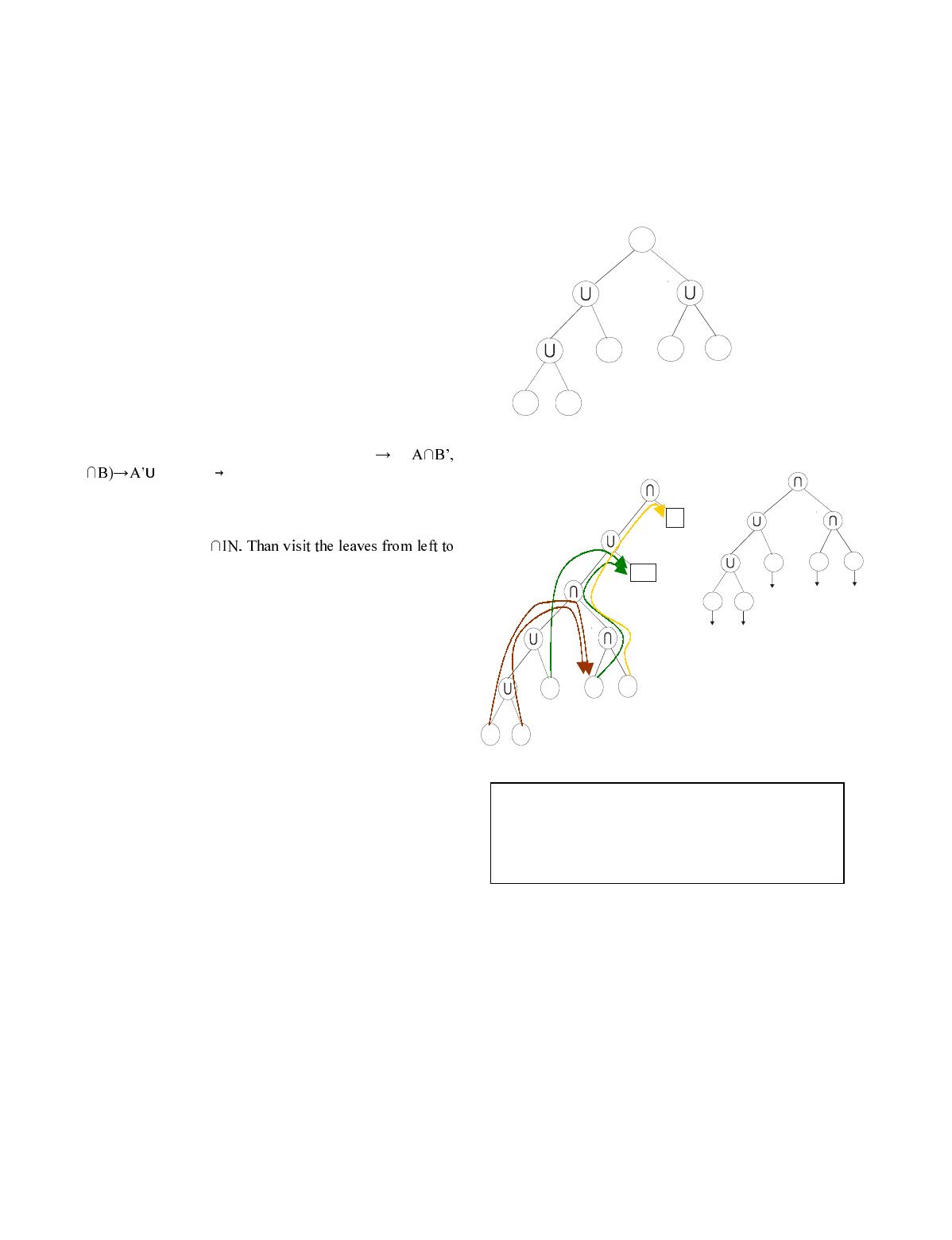
The Blist method transforms the CSG tree into decision
graph. A primitive classifies a candidate voxel and
depending on the result, forwards the voxel to one or
another primitive. To convert volume CSG tree to blist
representation firstly, convert tree into a positive form by
applying de Morgan’s law (i.e A-B
(A B’, (A’)’ A) and propagating complements
to the leaves, than rotate the tree by switching the left and
right children at each node make the tree left heavy and than
insert the resulting tree, T, as the left-most leaf of a two
level tree: (T U OUT)
right for each leaf, p, fill in the corresponding fields of
BL[p]. Figure 1(a) shows volume scene tree and Figure 1
(c) shows Boolean list representation of this volume scene
tree.
In Figure 1 (b) the leaves of tree are visited in the left-to-
right ord er. Then number the leaves with increasing positive
integers. For each leaf, numbered p, we compute its match,
M. Note that each arrow first traces a path upwards, first
reaching a node N1 coming from its left child, then reaching
a node N2 with a different operator still coming from the
left child. If N2 operator= U, the sign of p, Blist[p].sign is
inverted. Then, the arrows follow the pointer to
N2.rightChild and take the left-most child at each internal
node, until they reach the matching leaf M. Then, if M does
not yet a have name, it grab the lowest available strictly
positive integer and use it as its name. We also store that
name as the stamp, Blist[p], of p. on the Figure 1 (c), we
show resulting names for the leaves (inside the circle) and
their stamp, Blist[p].stamp, of p. Note that four leaves do
not have a name and that only one name is needed for the
entire tree.
Blist represent a CSG expression as a table called BL, of
primitive entries. Here BL[p].primitive Reference is the
reference to the primitive’s description, which includes its
type, parameters, color, BL[p].sign is the binary sign value,
when set, that the result of classifying a cell against the
primitive should b e complemented. BL[p].name is the name
associated with the primitive and BL[p].stamp contains the
name of the next primitive in the list that should classify the
voxel that are inside the current primitive if its sign is
positive, or the voxels that are outside of the current
primitive, if its sign is negative.
-
cube1
cube2
CT
cylin d er1
cylin d er2
(a)
1
1 1
2
2
1
(c)
(b)
The Blist table resulting from conversion of volume scene
tree in Figure 1 is as follows:
Figure 1 (a) Volume scene tree
(b) blist conversio n process of volume
scene tree
(c) converted tree
After filling Blist table, for the set membership
classification a label is attached to each voxel and pass to
the successive primitive in the Blist. When the label
matches the primitive’s name, the voxel is classified against
the primitive. If the result of this classification matches the
primitive’s sign, the name on the primitive’s stamp is put on
the label, if not zero, name is put on the label of the voxel.
At the end of this process, if the labe l on the voxel matches
the IN’s name, the voxel is inside the volume scene tree
otherwise, it is out. In this representation, each voxel has a
classification status with respect to all primitives and we
can use the color of a primitive in its intersection with its
active zone [11]. If the voxel lie in several primitives that
overlap, in this case the result will be order dep endent.
III. VOXELIZATION ALGORITHM
Voxelization is the process of generating volume dataset
from a geometric model. Conceptually, voxelization is a set
membership classification problem for all voxels in a
volume against the given 3D model. In addition, from the
view of the process, voxelization is a 3D scan conversion
process.
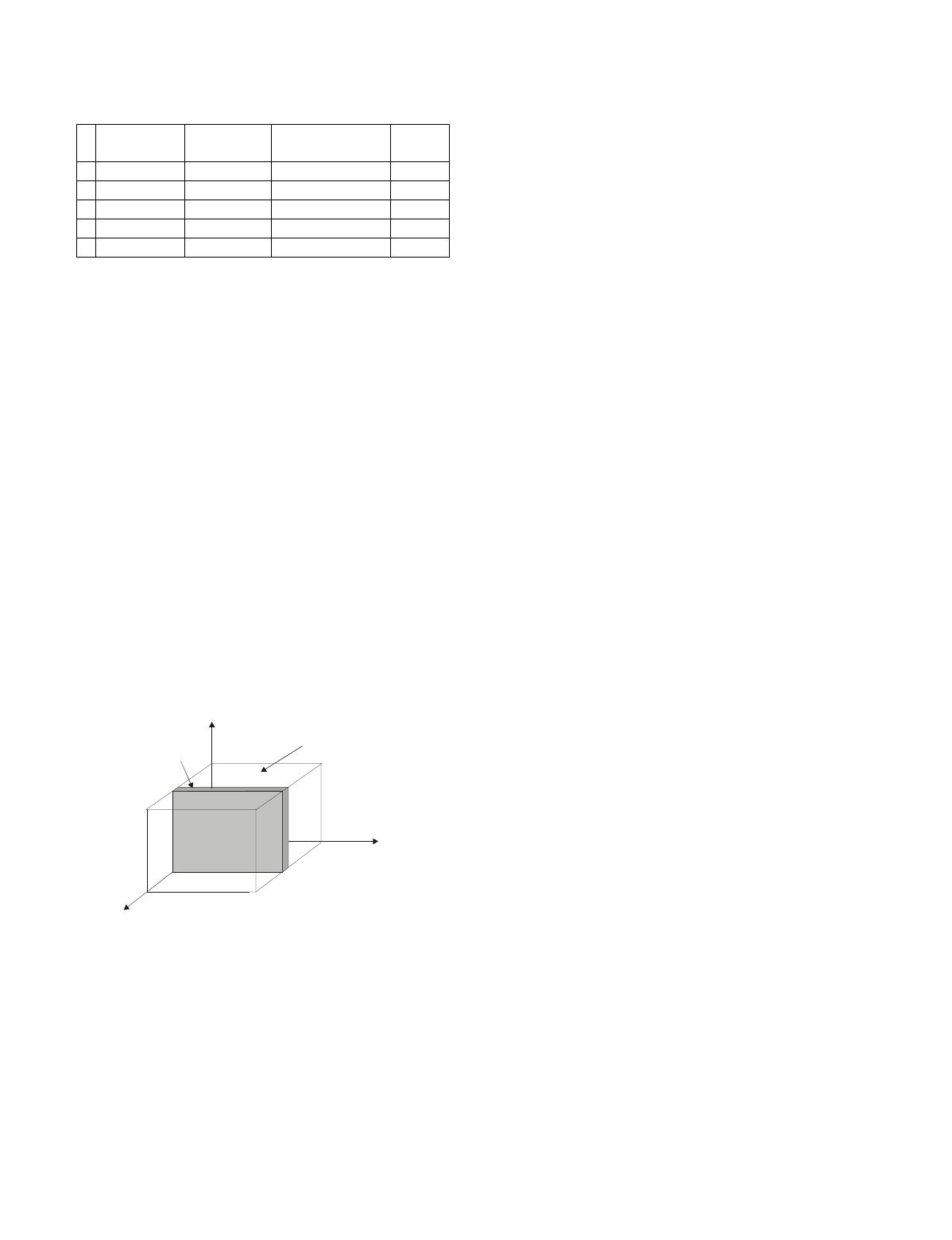
Z
X
Y
Vol um e sp a ce
One slice
A cubic volume space is first defined over the CSG model.
The algorithm proceeds slice by slice in a front-to-back
order by moving the Z-plane, a plane parallel to the
projection plane, along the viewing direction to generate
slices for all primitives (Figure 2). For each slice, the
algorithm defines the viewing volume of the system as a
thin space between two adjacent Z-planes inside the volume
boundary, and then renders each primitive within this
viewing volume. When the algorithm moves from Z-plane
to Z-plane, slices of the primitives are displayed and
composited onto the frame buffer in a front-to-back order.
Using proper color-coding of the primitives, the algorithm
can directly generate slices of the point classification
indices in the frame buffer. These classification indices can
then be mapped, by the PCM, to form a binary volume of
the CSG model. The distance between adjacent Z-planes
determines the resolution of the volume in the Z direction.
The reso lutions in the X and Y d irections are determined by
the size of the display window.
If the CSG tree has n primitives n distinct colors are
assigned to the different primitives so that the color co de of
the jth primitive is a binary number, with the jth bit set to 1
and all other bits set to 0. For a sp atial point P, the color of
P with respect to the jth primitive, C
j
(P), is defined as the
color of the jth primitive if P is inside the primitive, and o
otherwise. Now, if we combine C
1
(p), C
2
(P),…C
n
(P) using
a logical operation OR or XOR, the result, C(P), is exactly
classification index of point P. Thus, for each Z-plane,
algorithm generates a slice for each primitive, and then
composites the slices from the primitives into one single
slice of classification indices in the frame buffer using
appropriate frame buffer pixel functions. This composition
process is carried out as follows:
For a primitive defined by its surface boundaries, since only
the boundary surfaces are drawn, we need to have a way to
determine the interior points. The idea is similar to the
voxelization algorithm described in [7], and is based on the
principle that when a ray is shot from a pixel towards the jth
primitive in the viewing direction, it has to enter the
primitive object first (jth color bit becoming 1) and stay
there (keeping the jth bit ) until it exits the object (changing
the jth bit to 0). This can be done by drawing the boundary
surfaces of each primitive with a logical XOR operation
(Figure 3). When a slice is complete, the frame buffer will
not be cleared, i.e. the frame buffer content of the slice will
be used for blending operations with subsequent slices. This
way, the XOR operation will automatically set the jth color
bit to 1 for all interior points, and 0 for all outside points.
Since the pixel colors on the slice generated by the jth
primitive has 0’s at all bit positions except the jth, the XOR
operation for the jth primitive will have no effect to the
classifications of other primitives.
One the classification indices are generated in the frame
buffer for each slice, the Point Classification Map can be
applied to the frame buffer image to generate the final CSG
classifications.
P Bl[p].name BL[p].sign BL[p].Primitive
Reference
Bl[p].
stamp
1 0 + A 1
2 0 + B 1
3 0 - C 2
4 1 + D 2
5 0 - E 1
Figure 2. Volume space slicing
of 4
免费下载
【版权声明】本文为墨天轮用户原创内容,转载时必须标注文档的来源(墨天轮),文档链接,文档作者等基本信息,否则作者和墨天轮有权追究责任。如果您发现墨天轮中有涉嫌抄袭或者侵权的内容,欢迎发送邮件至:contact@modb.pro进行举报,并提供相关证据,一经查实,墨天轮将立刻删除相关内容。
自由职业
最新上传
下载排行榜
1
2
白鳝-DBAIOPS:国产化替换浪潮进行时,信创数据库该如何选型?.pdf
3
centos7下oracle11.2.0.4 rac安装详细图文(虚拟机模拟多路径).docx
4
PostgreSQL 缓存命中率低?可以这么做.doc
5
李飞-AI 引领的企业级智能分析架构演进与行业实践.pdf
6
达梦数据2024年年度报告.pdf
7
吕昕-如何建设人人都能训大模型的技术氛围-V脱敏.pdf
8
菜鸟低代码创新实践:全栈转型与技术效能突破.pdf
9
刘杰-江苏广电:从Oracle+Hadoop到TiDB,数据中台、实时数仓运维0负担.pdf
10
曾国洋-端侧模型的知识密度:迈向 AGI 的关键技术实践.pdf

相关文档
评论